| 仭侾仭丂捈寢偵偰摦嶌妋擣 |
|
柍慄壔偡傞慜偵桳慄偱偺摦嶌妋擣傪峴偄傑偡丅 乽MotionProcessor乿偺儅僯儏傾儖偵廬偄丄SETUP夋柺偺Comport偵帺娐嫬偺捠怣億乕僩偺斣崋傪愝掕偟傑偡丅 偙偙偱俹俠偐傜偺憖嶌偱僒乕儃偑摦偐偣傞帠傪妋擣偟偰偔偩偝偄丅 |
| 仭俀仭丂MotionProcessor懁偺僐僱僋僞偺嶌惉 |
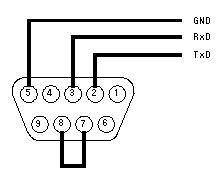 僔儕傾儖偺僐僱僋僞乮俢僒僽俋僺儞乯偲俵俹傪宷偖働乕僽儖傪嶌惉偟傑偡丅
僔儕傾儖偺僐僱僋僞乮俢僒僽俋僺儞乯偲俵俹傪宷偖働乕僽儖傪嶌惉偟傑偡丅嵍恾偑寢慄恾偱偡丅僐僱僋僞偼僆僗傪巊梡偟傑偡丅 僺儞偺斣崋偼僐僱僋僞偺愙懕懁傪傛乣偔尒傞偲彫偝偔崗報偝傟偰偄傑偡偺偱丄娽傪嬅傜偟偰妋擣偟偰偔偩偝偄丅 偲偄偆偺傕晄恊愗側偺偱丄愙懕幚尡偡傞偨傔偵嶌惉偟偨僐僱僋僞偺幨恀傪宖嵹偟傑偡丅 嬤摗僒乕儃偺働乕僽儖偲怓傪崌傢偣偰偁傝傑偡偺偱嶲峫偵側傞偲巚偄傑偡丅 
|
| 仭俁仭丂BlueStick偺愝掕 |
|
MotionProcessor偺捠怣懍搙偼侾俋俀侽侽價僢僩乛昩側偺偱丄BlueStick偺捠怣懍搙傕侾俋俀侽侽價僢僩乛昩偵曄峏偟傑偡丅 乽BlueStick乿偺儅僯儏傾儖亂3-3.儃乕儗乕僩傪曄峏偡傞亃偵廬偄丄捠怣懍搙傪愝掕偟傑偡丅 僴僀僷乕僞乕儈僫儖偺愝掕偑廔椆偟偨傜 BTB192 傪懪偪崬傓偙偲偱愝掕偑姰椆偟傑偡丅 偙偺嶌嬈傪BlueStick丒俙丄BlueStick丒俛偵懳偟偰峴偄傑偡丅 傑偨丄BlueStick丒俛偼帺摦愙懕偺愝掕偵側偭偰偄傞偺偱丄儅僯儏傾儖亂3-2-4.帺摦愙懕宆僐乕僪儗僗傾僟僾僞乮俛乯偺愝掕曄峏俀亃 偵廬偭偰BlueStick丒俙偲偺儁傾儕儞僌傪愝掕偟偰偔偩偝偄丅 |
| 仭係仭丂HeartToHeart俀偺愝掕 |
|
HeartToHeart俀偺SETUP夋柺傪奐偒 Comport偺捠怣億乕僩偺斣崋傪亄俀侽侽偟傑偡丅 侾偑巜掕偟偰偁偭偨側傜俀侽侾偲側傝傑偡丅 偙傟偼MotionProcessor偺慜恎丄俫俽倂俛侽俀偐傜偺乽偍傑偠側偄乿偱偡丅 偙偆偟側偄偲BlueStick宱桼偱偼摦偐偡偙偲偑弌棃傑偣傫丅 HeartToHeart俀丄媦傃MotionProcessor偼捠怣帪偵僼儘乕惂屼傪峴側傢側偄巇條偱偡丅堦曽丄BlueStick偼捠怣帪偵惂屼怣崋傪昁梫偲偟偰偄傑偡丅岞幃僒億乕僩忣曬偱偼側偄偺偱丄偙偙偱僴儅傞恖傕懡偄偐偲巚偄傑偡丅 |
| 仭俆仭丂愙懕 |
|
偝偀丄弨旛偼惍偄傑偟偨丅 帺摦愙懕懁偺BlueStick丒俛傪MotionProcessor偵 帺摦懸庴懁偺BlueStick丒俙傪俹俠偵憰拝偟傑偡丅 BlueStick摨巑偑俁侽cm埲撪偵偁傞偲偍屳偄偑姳徛偟偰宷偑傝埆偔側傞偦偆側偺偱丄偪傚偭偲棧偟偰偍偒傑偟傚偆丅 BlueStick偺揹尮傪偄傟偰椉曽偑係夞/昩偺憗偄揰柵傪偟偰偄傞偺偱偁傟偽丄BlueStick摨巑偱夞慄偑妋棫偟偰偄傑偡丅 HeartToHeart俀偺POSITION EDITOR夋柺偱BOARD LINK偺僠僃僢僋儃僢僋僗傪ON偵偡傟偽丄 夋柺偺憖嶌偵崌傢偣偰僒乕儃偑摦偔帠偱偟傚偆丅 柍帠丄柍慄壔嶌嬈偑廔椆偟傑偟偨丅偍旀傟條偱偡丅 側偍丄俛俿宱桼偱僗僋儕僾僩僾儘僌儔儉偺彂偒崬傒偼偱偒側偄傛偆偱偡丅 偙傟傪峴側偆応崌偼僔儕傾儖働乕僽儖偱捈寢偟偰偔偩偝偄丅 |
奺帺偺娐嫬傗偦偺懠偺栤戣偱丄偙偺捠傝偺庤弴傪摜傫偱傕偆傑偔偄偐側偄応崌偑偁傞偐傕偟傟傑偣傫丅
偁傜偐偠傔偛椆彸偔偩偝偄丅
傑偨丄婰嵹楻傟傗娫堘偄側偳偁傝傑偟偨傜偛巜揈傛傠偟偔偍婅偄偟傑偡丅
仭栠傞