| 2005/06/01 (水) |
 分配基板完成。手が遅いなぁ(汗)
分配基板完成。手が遅いなぁ(汗)電源スイッチとフレームと基板が一体となった構造なので、何かあったら全て作り直しとなる一品です。 昨日見つけたコネクター。 基板に挿そうと考えていたコネクタのピンはコネクタ同士をつなぐ側でした。 基板側のピンの太さと基板の穴の大きさが合わないので結局、穴を拡張することとなりました。 まぁ間隔が同じだからそれほど苦でなかったのが救い。 ちなみにこのメインスイッチ。胸の真中につきます(爆) 誰か押せ!(試合中に) |
| 2005/06/02 (木) |
|
中継基板側の電源線にコネクタを半田づけ。 +と−とで2本づつピンがあるので、このピンの間にコードを入れて大量の半田を流し込んで固定。 んで、端子を熱収縮チューブで絶縁。コネクタのピンへの半田のノリが悪くて悪戦苦闘×2×4。 ・・・もっとうまいやり方があるように思うんだが・・・まぁ出来たからいいや。 このコネクタの塊が胸の奥の空間を占拠して、他に何も入れられなくなったのが誤算。 えんぱくの胸郭は“だっちゅーの関節”のせいでただでさえ狭かったのだが〜。 ここに入れようとしてたデジタルコンパスとか、どこに持っていこう? 血管が全身にまわったので次は神経。 高屈曲ワイヤー6本を束ねて熱収縮チューブで被覆。とゆーのを4つ作成。 これにはコネクタ端子の圧着が48回(泣) 高屈曲ワイヤーはそのままだと圧着できないので、 芯を半田でコーディングしてから圧着するという方法をとっている。嫌だ嫌だの単純作業。 圧着ペンチを握る作業をしていると訓練中のシンジ君の気持ちがよくわかる。 「目標をセンターに入れてスイッチ・・・。」 「目標をセンターに入れてスイッチ・・・。」 「目標をセンターに入れてスイッチ・・・。」 「目標をセンターに入れて・・・。」 ああ、気が滅入ってきた。 「逃げちゃ駄目だ」 「逃げちゃ駄目だ」 「逃げちゃ駄目だ」 「逃げちゃ駄目だ」 「逃げちゃ駄目だ」 「逃げちゃ駄目だ」 「逃げちゃ駄目だ」 「逃げちゃ駄目だ」・・・ エヴァもネタ的に古いか(笑) |
| 2005/06/03 (金) |
|
「目標をセンターに入れてスイッチ・・・。」 「目標をセンターに入れてスイッチ・・・。」 「目標をセンターに入れてスイッチ・・・。」 「目標をセンターに入れてスイッチ・・・。」 「目標をセンターに入れてスイッチ・・・。」 「目標をセンターに入れてスイッチ・・・。」 「目標をセンターに入れて・・・。」 48回の圧着の前に、24回のコードの切り出しと48回の被覆剥きと48回の半田コーティングを行う現実に打ちのめされてる昨日と今日。 モーションまで手がわまらないことは確実なので、今回も『サグラダ・ファミリア』決定(泣) とりあえず、明日のカンファレンスには持っていきます。 そのカンファレンスですが、懇親会は諸般の事情により参加しませんのであしからず。 25:30 信号線ケーブルがちょっち短かくて作り直しなんて罠にはまる。 3歩進んで5歩くらい戻ってるような(涙) サッカー観ながら頑張ろう・・・。 |
| 2005/06/04 (土) |
|
今日は18:30からメガらんらん!ギガるんるん Vol.3だったのですが、
カンファレンスが終ったそのとき、外は傘も意味をなさないほどの豪雨だったので近所の懇親会会場に緊急避難。
そのまま飛び入りで懇親会に参加してしまいました。 ああ、「みずさわバンド」気になる〜(笑) そのカンファレンスの話。 寝足りない体に鞭打ってカンファレンス会場へ。 ちょうど前田さんと一緒になったので、WBSでの衝撃発言の裏話なんぞを聞きながら会場入り。 今回の参加者は120余名ということです。  最初は初心者編です。
最初は初心者編です。森永さんが講師で「二足歩行ロボットとは」と題してROBO−ONEのルールの解説。 足裏の規定や予選、本戦ルールなど。しっかり把握しておきましょうとのこと。 実際に作る場合は「人の真似」で基本を押えてから「自分流」の色を付け足していくのがコツとか。 「最初から自分流でロボットを作ってもうまくいきません。」ああぁ耳が痛い。 次は吉村さんによる「ロボットの作り方」 KHR−1に至るまでの試作の流れや、 SC−EZAを使うと簡単にロボットが組めますよ。という話。 KHR−1は最初に足だけのモデルで歩行のテストを行ったそうです。ここでも 「まずオーソドックスな形でテストして、コツを掴んでからオリジナルへ。」ああぁ耳が痛い。 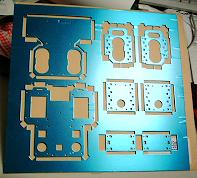 そしてKHR−1のサーボをKRS2350ICSへ換装する加工方法を紹介。
そしてKHR−1のサーボをKRS2350ICSへ換装する加工方法を紹介。「胸板はどうするの?」という要望に答えてボディーパーツキットが参加者全員に無料配布されました。 曲げやタップ加工が必要ですが、その方法もちゃんと解説。 ちなみにこのパーツキット、カンファレンス会場限定で以後入手することは出来ません。 次は杉浦さんによる「ロボットの歩かせ方」 ダイナマイザー式静的歩行、動的歩行の解説。杉浦さんはホームポジションの決定が大事!を力説。 ちなみにダイナマイザー式ホームポジションは ・骨盤と胸は常に地面と平行 ・両膝は軽く前に ・手首は足裏のつま先の位置に 杉浦さんのカンファレンス資料の最後のページにこんな文章が書いてありました。 「まずは最初の一歩を踏み出そう。せっかく作ってもいつまでもサグラダファミリアでは勿体無い」ああぁ胸が痛い(爆) サグラダファミリアは知名度は高いけどいつまでたっても作成中で歩かないロボットを指します。 オイラのえんぱくはサグラダファミリア1号と呼ばれています。ちなみに2号はゴ・・・(自粛) 初心者編の最後は上光さんによる「無線通信のすべて」 今朝まとめた(笑)というスライドをもとに個人的所感を連発。 「なんでみんなコレ使ってるんだろうね?」「コレ使えねぇ」とかズバズバ(笑)聞いてて面白かったです。 「BluetoothのUSBアダプタは使わないでください。これは何かあるとき時間がかかる!」 Bluetooth機器の接続レポを書いた自分としても同意見です。 Bluetooth機器は相手を選ぶきらいがあります。手なずけるのに苦労する時があります。 メーカーは同じ商品2つによる通信を薦めています。  お昼休みを挟んで午後の部スタート。レベルアップ講座です。
お昼休みを挟んで午後の部スタート。レベルアップ講座です。最初は上光さんによる「ロボットサーボの全て」 今朝ネット等で情報収集したスライドを映しながら KO、HITEC、FUTABA、JR、ROBOTISのサーボを説明・・・が途中で飽きて、 いきなりサーボの解体ショーを開始。サーボを次々と分解しはじめました。 価格の高いサーボの分解に会場からは歓声が(笑) その後、森永さんの「センサーの活用」、 坂本さんの「走る」、 菅さんの「マスタースレーブの操作性向上」と続きます。 今までの改良の歴史を垣間見る事が出来ました。 坂本さんが講演の中で「蹴る」という表現を多用していました。 「蹴る」とは具体的にどのようなモーションなのか疑問でしたが、どなたかが質問をしてくれたので氷解。 ZMPで足裏の位置を地平線下に指定することだとか。この深さが「蹴る」量です。 休憩を挟んで、ロボットの全貌解説。 午前中に「特徴はシルエットだけ」と言われた吉村さんが、その言葉を根に持ちながらR-Blue8 type ZG の解体スライドショー。 頭から順に解体していく様からメンテナンス性の高さが窺い知れました。 ネジ締めが困難な部位が全くない(と思う)ということに脱帽。さすがは「神」! グレートマジンガア、HAJIMEロボット、ダイナマイザーについても、各製作者が解説。 最後はonPCの話。 いろいろなネタやツールが津藤さんのHPにあるようです。 「早くモデルを用意して Simulink に時間をかけよう!」 今回のカンファレンスは一人の講師が「初心者向け」「レベルアップ講座」「自分のロボの解説」の3テーマを発表していました。 資料つくりは大変だったと思います。お疲れ様でした。 追伸:菅原さんの生存が確認されました(笑) |
| 2005/06/05 (日) 朝 |
|
まさゆきさんのHPでコメントした「ヒンズースクワット大会」を会場の片隅でひっそりとやる話が進行中。
前に進めないけど屈伸くらいなら出来るだろ〜と冗談で書き込んだヒンズースクワットだけど・・・。
どんな大会なんだ?(笑) ちなみに「目標をセンターに入れてスイッチ・・・。」の圧着作業は脚の分が出来ていない(遅っ!) 25:30 (1:30) これから作業開始・・・。間に合うんかいな? 27:00 (3:00) 眠いよー。耳鳴りがするよー。熱収縮チューブが見付からないよー。・・・思考力ゼロ(笑) 27:30 (3:30) 真夜中に高屈曲ワイヤーの被覆剥きなんてするもんじゃねーな。眠すぎて微妙な力加減ができん。 29:30 (5:30) 裏でメテオールの曲のダビングなんてしてたから時間かかっちゃったけど、やっと終ったよ信号ケーブル〜。 取り付けがまだだけどもう寝る!限界! 9:00 さ、再起動・・・。配線したら荷造りして会場へGoだ・・・。モーションは向こうでやろう・・・。 低血圧だから朝はつらい・・・。ZZzzz・・・、おっとイカンイカン。 11:30 やっぱり手が遅いと自覚。今度から計画したスケジュールに能率係数1.6かけて計画を立てようか? 中継基板の取り付けネジの頭が信号線コネクタと干渉していたのでネジの取り付け位置をちょっと変更。 やっと配線し終わったので、これから出発。 |
| 2005/06/05 (日) 夜 |
|
行ってきました「ヒンズースクワット大会」・・・いやいや ROBO-ONE Dash Time Trial。 なんですがレポートは明日ということでよろしく。 (会場ではずっと えんぱく の調整を行っていたので内容が薄くなるかもしれません) 来週は朝が早いのでもう寝ます。 一言だけ。総合優勝は前田さんでした。おめでとうございます♪ |
| 2005/06/06 (月) |
|
日曜日の午前中は ROBO-ONE Dash Time Trial でしたが、
家でえんぱくの配線作業を行っていたため観戦できず。どんな模様だったんでしょう?誰か教えて(笑) 午後は ROBO-ONE 宇宙大会想定time trial。 千鳥模様のように配置された1/4リングの上を数秒遅れる画像を見ながら走破するという競技。 リングアウトは即アウト。宇宙からの帰還は認められません。  試合会場はこんな感じに部屋を区切ってロボットが見えないようにしていました。
試合会場はこんな感じに部屋を区切ってロボットが見えないようにしていました。これだと走破するロボットか、遅延する映像しか見られないんですよね。 ベストポジションは解説者席。ちょっとお客さんに対してサービス悪いんじゃないかな〜。 そこで提案。 スクリーン・操縦者・競技場・客席という配置にすれば 遅れる映像も、悪戦苦闘する操縦者も、走破するロボットも全部見られて良いと思いますが、どうでしょう? 操縦者の背中側にロボットがあるから目視はできないしね。 競技の内容はテスト競技らしくルールを調整しながら毎回変えてやっていました。 初回の競技では1秒遅延の映像で行っていたのですが、難易度が低く、次の競技からは3秒遅延で行うことに。 カメラの位置も都度変更。 これがゴルフ大会でのカップの位置よろしく難易度を左右して意外な面白さを醸し出していました。 もう一つ面白いのが操縦者のリアクション。 粗くて不鮮明な映像でロボットの向きを見失って苦労する様や、 いきなり「ゴール!」と叫ばれて、映像とのギャップに虚をつかれながら喜ぶ様とか。 「右だ左だ。とか言って教えないでね」とお客さんに注意しておきながら、ほぼリアルタイムで実況してしまう解説者っていうのも裏の面白さ(笑) 最後にそれぞれの条件下での最速ロボットが一堂に会し、新たなリング配置、ゴールから見た映像で挑戦。 最速王は前田さんでした。 前田さんは午前中の Dash Time Trial でも優勝していて一挙に2冠です。 「前から"2"には縁があったんですが、今日は1位を2つとりました。」 コメントナイスです♪ 
もう1つ。会場の片隅で極秘裏に行われるはずだった「ヒンズースクワット大会」 サグラダ・ファミリアなロボは屈伸も満足に出来ないので、ぐだぐだなうちに終了。 まさゆきさんのロボが唯一屈伸していたので優勝(笑)なんだかねー(笑) 川崎駅内のお店で打上げ。前田さん、ごちそうさまでした♪ 2次会は「1時間なら参加するよ」で行ったカラオケでたっぷり2時間半アニソンの大合唱(爆) 皆様、お疲れ様でした。 |
| 2005/06/07 (火) |
|
手に持つ携帯電話すら重く感じる今日この頃。う〜、体だ〜りぃ〜。 いつぞやのタマネギ臭い注射の効果が早くも薄らいできたって事か?今宵は森永さんより早く寝よう(笑) BBSのまさゆきさんの書き込みから >会場の片隅で極秘裏に行われるはずだった ぜんぜん極秘裏じゃなかったです。 なんせ、ビッグボスがえんぱくの前でインタビュー受けていたんですから。 まぁね、選手控え室の最前列を占拠してたからね(笑) そのビッグボスに「ここ取材あるから」と指差されちゃったので慌てて全否定! さ、参加者じゃないですから〜 そしたら釘刺された。 「宴会ばかし参加してるんじゃ駄目だ。」ううぅ耳が痛い(爆) その えんぱく。 会場でH2Hをインストールして初期設定。 ノートパソコンが古すぎて(VAIO PCG-N505A/BP)スペックが足りないのかサーボを人型に配置するのに一苦労。 マウスの追従が遅延するのでゆっくりやらないと思った位置にならないのよ。 そして、サーボ90°を設定した状態をホームポジションに設定。 ボタンクリック! ・・・ぴくっ!!一瞬痙攣するだけ。近藤科学の人にも見てもらったのですが原因不明。 「動こうとしているけどリセットかかってますね。 サーボコネクタを1つ1つ付けていって原因を探ってみましょうか?」 言われた通りにしたところ、中継基板が悪さをしていることが判明。 せっかく作ったのにー(泣) 中継基板のどこが悪いのかは調査中。 ROBO-ONE用語集に「1面トップ」「サグラダ・ファミリア」「えまのん足」を追加しました。 |
| 2005/06/08 (水) |
|
分配基板の作りがマズイようです。 スイッチOFFの状態で中継基板の+と−にテスターを当てると2Ωなんて表示されるし・・・。 (サーボのコネクタは全て外しています。) 明日はコイツを徹底調査だ〜。 こんな状態でROBO-ONEビギナーズに出られるのだろうか? エントリー締め切りは12日。・・・飛び入りってあり? |
| 2005/06/09 (木) |
|
スーパーラジコンまでコネクタの予備を買いに行ったついでに、
そのちょっと先の「ひよこ家」まで足を伸ばして晩飯。 「ひよこ家で飯なんてどう?」と宴会カメラマンとして一部で有名な友人を誘い出す。 と、ここまでは良かったんだが、オイラの財布に小銭も残ってないことが発覚。 おごってもらった。 けして計画的犯行でないことをココに断言しておく。いや本当だって(汗) この埋め合わせは馴染みのもんじゃ屋か、馴染みの串焼き屋か、最近のお気に入りの餃子屋の時に。 えんぱく分解中。 |
| 2005/06/10 (金) |
|
2Ωはモーションプロセッサの回路抵抗でした。 ホームポジション設定で気絶する えんぱく の原因を突き止める作業中。 オイラのお手製パーツを一切排除して確かめてみる。 安定化電源を直接モーションプロセッサに繋ぎ、サーボもモーションプロセッサに取り付ける。 黒ヒゲ危機一髪よろしく、1つづつサーボを繋げてホームポジション設定していくと・・・。5個6個つなげたところでアウト! 原因が判明しました。 安定化電源です! オイラが使っている電源はアルインコのDM−305MVなんですが、 改めて取扱説明書を読むと、しっかり書いてありました。 「ランプやモータ等は、電源投入時に定格電流の数倍の課題電流が流れますので 保護回路が働き使えない事があります。」 ・・・やっぱりROBO-ONE業界標準のDM−330MVじゃないと駄目か? オイラの取るべき道は2つ。 ①マイコン電源とサーボ電源を分離する。 ②DM−330MVを買う。 今まで(マイコン/サーボ別電源だったけど)DM−305MVで充分やって来れてたんだけどなぁ。 電気喰いなロボットにしちゃったなぁ(汗) |
| 2005/06/11 (土) |
|
7月上旬に従妹の結婚式があるので、そのときに着ていくスーツを新調する。 ただ、オイラは衣食住に無頓着な人なので助っ人を呼ぶ。 大学時代の友人に「スーツはいつもオーダーメイド」という剛の者がいるのでお願い。 結婚式に着る服なので、既製品じゃあ面白くないよなぁ〜と思っていたのだが、 友人が店員と交わす謎な専門用語。ビジョンも何も決めていない優柔不断なオイラ。 難産でした(汗) 右も左もわからん奴が(セミ)オーダーメイドなんかするんじゃねぇよって感じ? こんなお客で申し訳ない。 三十路の独身男なんだから少しは身嗜みについて勉強しとかかなきゃイカンなと痛感。 (だけど軟弱で引き篭もりなアキバ野郎なのでこのままズルズルいきそうな予感<駄目だって) あとで靴とネクタイも新調しなくちゃ。 ROBO-ONE用に赤いシャツを・・・いやいや、それはあの人の専売特許だ(爆) ロボットの進捗はナシ。 マイコン用の別電源をどこに載せようかと思案していたりするのだが、 BBSに安定化電源に関しての書き込みを多数いただく。ありがとうございます。 |
| 2005/06/12 (日) |
|
せっかくの日曜なのに何もしないで過ごす。出不精ここに極まれリ。 8月の大会に向け、センサーやら何やらを組み込まなければならないのでイメージ出し。 分配基板は1つ細工を組み入れたいので作り直し。 DASHの時の騒動からメンテナンスの悪さを実感しちゃったので、 電源線のコネクタを分配基板側から中継基板側へ移したいのだが・・・どうしたものか? マイコンの使い方も覚えなくっちゃな。PIC? PSoC? |
| 2005/06/13 (月) |
|
定期入れ紛失! 今朝の一大事。探しても探してもみつからない。しょうがないからそのまま出社。 家にあることは確実なので、帰ったら捜索隊を組織してローラー作戦を〜と考えていたら、 あっけなく目の前にあった。PCキーボードの斜め前、TVのリモコンの影に・・・。 何故、朝にみつからなかったんだろう?(謎) |
| 2005/06/14 (火) |
|
ほりさんに緊急電文! そろそろ出るって。 大人買いを是非(笑) (立ち読みした模型情報誌でキャッチ☆) オイラのロボットは進捗ナシ(泣) |
| 2005/06/16 (木) |
|
イベントフラグが立たない毎日。 なかぷ君のHPがまもなく60000HITだと言う事で突撃したら59999HITだった。 「F5」連打の誘惑にかられたが、なけなしの理性でぐっと我慢(笑) 次に狙っているのはまさゆきさんのHPの44444HITだという事はココだけの秘密。 ・・・そんな事してねーで、ロボットやれよ。 シャープの測距センサーの使い勝手を調べようと準備している。 PIC-BASICなら、オイラの「マイコンは敷居が高いよと思っちゃう症候群」を克服できるんじゃないだろうかと望みを託す。 ぐだぐだ言う前に手を動かせば問題解決!なのは自分でもわかっているんだけど、なかなか。 平日は妄想と情報収集で過ごして、週末に実行という行動パターンで行こう。ますます出不精になりそうだな(笑) |
| 2005/06/18 (土) |
||||||
|
惰眠を貪っていたら城間君からの電話で起された。 「いしかわさん!ビギナーズ行くんですよね!」 もちろん行くともー!と答えてから洗濯機をまわす。乾燥機もまわす。で、現場についたのは15:30頃(笑)  「ROBO-ONE Beginner's in 武蔵工業大学」の午前中はロボット体力測定で、反復横飛びとかのタイムを競ったそうです。
当然、その時間に会場入りしていないのでどんな内容だったのかはわからず。公式HPのレポートを待ちましょうか。
「ROBO-ONE Beginner's in 武蔵工業大学」の午前中はロボット体力測定で、反復横飛びとかのタイムを競ったそうです。
当然、その時間に会場入りしていないのでどんな内容だったのかはわからず。公式HPのレポートを待ちましょうか。 オイラが会場入りした時はロボットバトルの真っ最中でした。
オイラが会場入りした時はロボットバトルの真っ最中でした。試合を仕切っている、あのアマンダラ・カマンダラは誰だ?と思っていたら、宇宙ロボコンファイターX氏でした(爆) 仕事が忙しくて「休みとれるまでは剃るもんかー!」と伸ばした成果だとか。 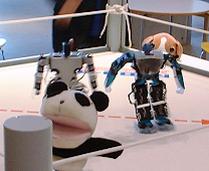 トーナメントは順調に消化され、優勝決定戦!・・・の前に余興が1つ。
トーナメントは順調に消化され、優勝決定戦!・・・の前に余興が1つ。「チャトランたこ殴り戦」 女子供の心をがっちり掴む、客寄せパンダことチャトラン。こいつを倒したモン勝ちというシンプルなルールなんですが、 足のないチャトランは、そんじょそこらの2足ロボに負けないくらいの起動性能を発揮してリング上をあっちこっちに逃げまくり。 なかなか捕まえられないし、倒れないし。逆にこっちが倒されたり(笑) そんなこんなで KONDO のKHR-1 と HITEC のRoboNova とで日韓共闘作戦。 隙をついてお互いを攻撃したりしてましたが、2台でパンダを追い詰めます。・・・が、それでもパンダ倒れず!(笑) 子供と動物とラーメンは視聴率がとれるって言うしなー(<そーゆう話じゃないってば) さぁトーナメントの決勝戦。
最後に参加者の皆さんで記念写真を。 参加者の皆さん、お疲れ様でした。大会運営の皆さん、お疲れ様でした。 おかげで楽しい1日でした♪ 
その後、懇親会と2次会のカラオケを自由が丘で。 のんのんさんが山本正之フリークだったことと、 平野さんがあのキーで浜崎あゆみを歌える人だったことにビックリ。 自由が丘の2駅先に大岡山という駅があり、その駅前にすごく美味しいラーメン屋台があるので帰りに立ち寄ってみたら・・・なかった。 非常に残念!誰か情報たのむ! |


| 2005/06/19 (日) |
||||||||||||||||||||||||||||||||||||||||||||||||
|
12:00 何か書いとかないと、何もしないで1日終えそうだから予定表。 夜までにいくつレポート出来るかな? ・測距センサーの距離と電圧の関係 ・測距センサーの測定幅の調査 17:00頃 PIC-BASICって簡単♪統合環境も馴染みやすい♪ オイラが「壁」と感じている部分はI/Oマップまで自分の自由になるってところなんだ!と確信。 ちょっとは縛りがないと途方にくれるタイプのようです。 PIC-BASICは液晶のI/Oが既に割り振ってあるので気が楽。何も考えずに表示が出来るって嬉しい♪ PIC-BASIC活用ブック 簡単なプログラムを組んで値を取り始めるとすごいふらつく。PSDセンサーってこんな落ち着きのない値を返すのか? 表示される値について何の確証もないのでテスターで測ったりして検証したり、 プログラムも5回サンプリングして最大/最小を除外した値で計算するように修正したり・・・。 だいたいいい具合の値を表示するようになったので、これから実験開始。 ああ、もう日が暮れてる(汗) 20:00頃 値の取り込み間隔を52.9ms以上確保する。VCC-GND間に100μFの電解コンデンサを入れる。 という手を施してふらつく値を押える事に成功。0.12Vくらい→0.04Vくらい 計測した結果は以下のとおり。 電圧はA/D値から計算で求めたので実測値と僅かに違うんですが、まぁ問題ないでしょう。
23:30頃 ああ、測定幅まで調査できなかった・・・。 |
| 2005/06/20 (月) |
|
さらば、安寧の日々よ〜 お仕事がテスト行程に入ったので、また帰りが遅くなりそうです。 仕事して帰って寝るだけの歯車生活は嫌じゃーっ! また婚期が遅れるぅ(汗) そんな訳なので今日はデジカメ写真の送付作業。 なぐさんに送信!ZIPPONさんに送信!SISOさんに送信! 後はリクエストがあったときに作業しよう(爆) ・・・ありゃZIPPONさん宛ては「サイズ超過」で戻ってきちゃった。 ・・・宇宙(中略)X氏にも送信!と思ったらアドレスが残ってねーや。どうすべ。 |
| 2005/06/21 (火) |
|
まぁ愚痴っててもしょうがない。今週のうちに消化する項目を列記しておこう。 ・測距センサーの距離と電圧の関係(対象物をアキカンに変更して) ・測距センサーの測定幅の調査 ・・・数日前と同じ項目な気がする・・・(汗) 明日は出来上がるスーツを取りに行くから、今日よりちょっと早めに帰宅できるはず。 実験できるかな♪ |
| 2005/06/22 (水) |
||||||||||||||||||||||||||||||||||||||||||||||||
 仕立てたスーツを取りに行く。
仕立てたスーツを取りに行く。途中の新橋駅前のSL広場に、子供の頭くらいの大きさのワイングラスを揺らしている「ゆうたろう」がいた。 (京ぽんの35万画素カメラじゃあ誰だかわからんのぉ。) ロケか?カンペを盗み見ると「テレビ東京・THE 占い」と書いてあった。・・・土曜の深夜番組か・・・。 対象物をアキカンに変更して再び測距センサーの距離と電圧の関係を調べてみた。
いる/いない の判定には使えるけど、近中遠の判定には使えなさそうだけど・・・どうだ? 近接距離で電圧が落ち込むっての、何とかならんかな。 ・・・明日も懲りずにデータ収集だぉ〜。軸線上からずれた時の変動を見よう。 |
| 2005/06/23 (木) |
|
火事だ、火事だぁ!火ぃ噴き始めたぞー!てぇへんだーっ! あ、いや、仕事の進捗の話ね。 来週からテストを開始するための準備作業を行っているのですが、 テスト計画書に間違いがあったり、仕様漏れが発覚したりと驚天動地の騒ぎ・・・。 こーゆう時はいらんミスが多発するもんなので細心の注意をはらって作業しなくちゃならんのです。 ですが、これが余程のストレスだったらしく突然の下痢(泣) 脂汗浮かべながら帰りの電車に揺られてました。かなりヤバかったです。 なにはともあれ明日1日乗り切れば週末で休みだ!意地でも遅らすもんか。 |
| 2005/06/24 (金) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
24:00 1週間のお努めご苦労様>オイラ♪ 週末だぁ♪お休みだぁ♪ 一通りHPをめぐり終わったのでこれから作業開始。 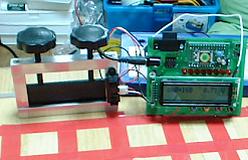 27:00
27:00以前、なぐさんに 「PSDはピンスポだから、測定幅なんてないよ。」 と言われていたので実証。 コタツの天板にビニールテープで5cm間隔の格子を作成し、そこに対象物となるアキカンを置いて値を計測する。 PSDは立てた格好で両面テープでミニベンダーに固定。ミニベンダーの使い方間違ってるよなー(笑) で、測定した結果は下表のとおり。 PSD上部(コネクタがついている側の反対側)の反応が若干強いのは SISOさんからいただいたデータシートのとおりか。
なんとか今週のノルマ達成。明日はこれを超音波センサーで計測しちゃおうかな? おやすみなさい♪ |
| 2005/06/25 (土) |
|
あーつーいー。 7月になるまではエアコンを入れないと心に誓っているのだが・・・くじけそう(汗) 天気予報は「今年1番の暑さ」と言って不快度数を無意味に引き上げているけど、 だいたい、この時期の「今年1番の暑さ」なんて「今年1番」だった試しがないので、 本当の今年1番の暑さに比べたら今日なんて過ごしやすい方だよ〜。と言い聞かせて体感温度を下げてみる。 今日も目標を設定。 ・超音波センサーで距離の測定(5cm格子で) 15:00 難攻。 浅草ギ研製の超音波距離センサーで距離を測ろうとするもピンの配置がわからない。 5本のピンのうち、空きピンが1ヶ所あるんだけど、はて?何処だっけか? そーいやぁVccやGNDが何処だかもわかんねーや。 浅草ギ研のHPは 新型の超音波距離センサーの説明で、旧型の説明が見当たらない。困った。 暑さで頭がいかれてたんだろうな。 気が付いたら 楽天のロボット王国で新型を注文していた。楽天ポイントで。 店頭受け取りをお願いしたんだけど、これだと楽天ポイントは使えないらしい。 その後、旧型の記事(浅草ギ研の以前の記事)が発掘できたので・・・キャンセルしちゃお。 18:00 まだ難攻。 PIC-BASICでパルス幅を計るにはどうすればいいんだ? ループで出力が1の間、カウントアップすればいいじゃん。と気付くまでに数時間。 さっそくプログラムするもうまく動作してくれない。 超音波距離センサーへの入力パルスは出ているのか? 超音波距離センサーは値を返しているのか? 読み込むポートが間違っているのか? そもそもプログラム自体が検討ハズレな事をやっているのか? 検証する術が確立していないので、もう何がなんやら。軽いパニック状態。 23:00 いろいろやったけど今日は結果出ず(泣) |
| 2005/06/26 (日) |
|
3:00 やーっと動いたっぽい。 BASICなので処理速度が遅いせいかカウント値が小さいのが気になる。普通こんなもんなの? 悪戦苦闘の様子は別の機会に。 それよりもお知らせが1つ。 本日、19:00より日暮里「和音」にてメテオールのライブがあります。 「和音」というライブハウスが6月で閉店するという話なので最後の日暮里ライブになります。 オイラはもう「日暮里行進曲」が聞けなくなると思うと、悲しくて悲しくて・・・。 興味を持たれてる方はいい機会なので「最後の和音ライブ」観に行きましょう! なかぷ君と のんのんさんは生で「日暮里行進曲」を聞く最後のチャンスなので是非(笑) 12:00 吉祥寺に居たりする。 結婚式用の服装の残りのパーツを買い揃えるためにまたまたコーディネートしてもらう。 吉祥寺なのは友人のテリトリーだから。 真夏日のうだるような暑さと店内の涼しさの温度差攻撃を幾度となく喰らい、 もしかしたら熱中症か?と思うくらい頭をクラクラさせながらアイテムを物色。 靴、ベルト、カフス、ネクタイを揃える。 この総額はモーションプロセッサーと同じくらい。 ・・・結婚式にご祝儀をだす前にオイラにご祝儀くれ!出費がイタイ(泣) 18:30 日暮里に居たりする。今日はメテオールのライブ。 会場となる「和音」が6月で閉店となるため多分、最後の日暮里ライブなんでしょうね。 メテオールはライブ会場(都市)毎にご当地ソングを持ってて、日暮里は「日暮里行進曲」という曲。 ♪日暮里、日暮里。ああ、日暮里〜 と1度聞くだけで2度と頭から離れなくなる強烈な歌なんだが、今日で聴き納め。 レポートは明日じっくりと。 「あんな風に書かれたら来たくなっちゃうでしょ〜」と のんのんさんが来場(笑) 新規1名開拓しましたよ〜>メテオール御一同(爆) |
| 2005/06/27 (月) |
|
昨日の霍乱のせいで頭重いし、体だるいし〜だったのでもう寝る。 ネタが腐る前にレポートをアップしたいと思うんだが...さて? |
| 2005/06/28 (火) |
ネタが腐るどころか、忘れそうなので慌ててアップ。(オイラの脳みそ既に容量不足?) 日曜日にあったメテオールのライブの話。
日曜日にあったメテオールのライブの話。開演30分前に会場となる「和音」に到着。 このドアも2度と開けることはないのかぁとしみじみしながら店内へ(ちなみにこのドアは2重ドアの外界側) すでに席は半分ほど埋まっていました。 この時間でこの人数? 今日の来客数は相当なものになるだろうなと思っていたら、案の定、立ち見も出るほどの大入りとなりました。  いよいよ開演。1曲目から会場は大盛り上がり。
いよいよ開演。1曲目から会場は大盛り上がり。「和音は今日で最後〜」という情念が会場一杯に渦巻いているので客のノリがテンション高目です(笑) 一気に出だしの数曲を歌いきった後は、のんびり楽器の説明なぞを。 「和音」が邦楽のライブハウスなこともあって、ここでの演奏は和楽器とかアジアの楽器とかを多用しています。 三味線、三線、口琴、ケーナ、アコーディオン等々。 メンバーが入れ替わる前はアルマジロの皮を使ったギターなんてものあったっけ。 そのうち話題は思い出話の方向に。何か想い出の曲ってある?という問いにトオコちゃん 「顔がゾンビ、顔がゾンビ〜って曲があるんですけど〜。歌っていたらお客さんが帰っちゃたんです〜」 会場大笑い。 「後半で歌うけど帰らないでくださいね〜」 会場再び(笑) 

 そんなこんなで前半終了。休憩をはさんで後半戦。
そんなこんなで前半終了。休憩をはさんで後半戦。後半1発目はご当地ソング「日暮里行進曲」多分今日が聞き納め(泣) で、次の曲いこうか!と言うタイミングでブツン!と変な音。トオコちゃんの三味線の弦が切れる。 いったんはそのまま演奏しようとしたけど、次の曲は切れた弦をよく使う曲らしく張りなおすことに。 急遽カズウさんの独演会。 「最近夢で良く見る、人前に出るのが好きで話し好きだった死んだじいさんを思って作った唄です。 未発表曲です。『涙そうそう』」って、おーい!それはっ(爆) 1番はオリジナルそのままでしたが、2番は即興の替え歌を。カズウさん最高♪ 弦を張りなおして、チューニングも終った?な矢先にブツン!「あ!」 ・・・カズウさんの話はまだまだ続きます(笑) 

その後は楽器が壊れる事もなく、「顔がゾンビ〜」で客が帰ることなく大盛り上がりで終了。 ライブの密度が薄いな〜と思っていたら3時間のライブだったんですね。そんなに長丁場とは思いもしませんでした。 他のライブ会場だと時間に追われることになるので、「進行を気にせずやれるのはココだけだよ」とのこと。 つくづく「和音」っていい場所だったんですね。 アンコールは・・・未定。通常はアンコール曲も準備してくるのですが今日はなし。 「何か聴きたい曲ありますか?今日演奏したものしか出来ませんけど。」 そんなこと言われたら、リクエストは決まってるじゃないですか!『日暮里行進曲』を! ♪日暮里、日暮里。ああ、日暮里! ♪日暮里、日暮里。ビバ、日暮里! メテオールのメンバーと、「和音」スタッフに惜しみない拍手を送ってライブは終了〜。 次回のライブは9月9日に秋葉原で、です。 メテオールは場所によって楽器構成を変えるのでどんなライブになるのか楽しみです♪ |
| 2005/06/29 (水) |
|
送別会があって飲む。ものすご〜く気分がいいので今日はこのまま寝ちまおう(笑) とりあえず、今週の作業をピックアップ。 ・超音波センサーが読めなかった理由の解析 ・超音波センサーで距離の測定(5cm格子で) ・リレーのON/OFF制御 ・てくにかる?カンファレンスに PIC-BASIC のコンテンツを追加 |
| 2005/06/30 (木) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
解析して動かなくなるとマズイので先に計測。 超音波距離センサーと縦置きした場合と横置きした場合で表を作成しました。 PIC-BASIC のループ文でセンサ出力H の時間をカウントした値です。 ①縦置きの場合 対象物ナシは 62 (部屋の隅?)
②横置きの場合 対象物ナシは 52 (なぜ値が違う?)
横置きの場合、測定範囲ギリギリの位置で値が安定しませんでした。 横置きのほうがいろいろなエコーを拾いやすいということなんでしょうか? PIC-BASIC 絡みの実験を回路図込みでまとめようと思っているのですが、 回路図を書くにはどんなツールを使えばいいんでしょう? フリーで使い勝手のいいのを知っていましたら教えてくださ〜い。 |
■戻る