最近はロボット開発なんて事をしています。気分は素形3四郎か兜十蔵か?
めざせ!第5回ROBO-ONE大会(予選は1/31、決勝は2/1だ!)
| 2004/01/01 (木) |

昨年中はいろいろお世話になりました。 また、このHPを見にきてくれてありがとうございました。 勢いで作り始めたロボットも、どうやら形になり動かせるところまで来ました。 今月末の大会までにモーションを間に合わせられるかどうかが一番の問題なんですが(笑) 何はともあれ、今まで通りのペースと内容でHPを更新していく予定です。 今年もお付き合いの程、よろしくお願いします。 一年の計は元旦にあり! と、いうことで今年の目標を・・・『嫁さんを見つける!』 なんかね、一人暮らしの寂しさに耐えられなくなってきました(笑) |
| 2004/01/02 (金) |
おせち料理食べたいよ~。雑煮食べたいよ~。お汁粉食べたいよ~。あべかわモチ食べたいよ~。
そーいや今シーズンはミカンも食べてないぞ。ま、実家に帰れなかったお陰でロボット作れてるんですが。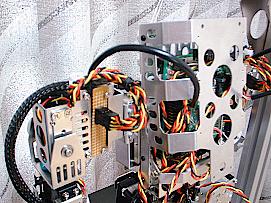 配線をまとめてみました。
配線をまとめてみました。配線処理って本当に難しいですね。 「曲げ」の部分はすんなり決まるんですが、「ひねり」の部分の処理は可動範囲が広いので大変です。 サーボの軸が貫通している構造だったら簡単なのに!と強く思いました。 早速アンケートに記入しておこうかな? サーボメーカーさんはロボット用のサーボを出すなら是非ご一考を! ってゆうか、作って、お願い! で、いろいろ考えた挙句、空中配線にしてしまいました。嗚呼・・・ さらに、HSWB02にサーボコネクタを無造作に繋げていて思ったのですが、 コネクタの部分には充分な高さが必要ってこと。 HSWB02の一番高い部分はトグルスイッチの棒で、 ここが当たらないように背中の厚さを決めたんだけど、コネクタを繋げたら背中カバーが閉まらなくなっちゃった。 なので中継コネクタの出番です。 信号線に高屈曲ワイヤーを使い、電源には太い線をそのまま使い、それらを熱収縮チューブでまとめました。 コネクタ部分に集まる線の体積は減らせたのですが、信号線と電源をひとまとめにしているのでノイズが心配です。 ま、もともとのサーボのコードも信号線と電源が三つ編みされているので大丈夫でしょう(ほんとか?) で、大問題が1つ(なんか毎回大問題が発生しているような・・・) 熱収縮チューブの長さが足りないんです。お店が開くのが5日からなんで買いに行けるの10日なんです。 ・・・み、右足の神経が繋がらん・・・ |
| 2004/01/03 (土) |
|
まだ正月の3が日だってのに徹夜拘束されそうになったので逃げ帰ってきました。終電で(泣) 「二度とこねぇよっ!!\(`д´)/ウワァァァン」 あ、いや、明日もちゃんと行きます。はい。 どうしましょう熱収縮チューブ(3φ)。 ベアリングを買ったRSコンポーネンツさんで扱っていたので注文しようとしたら、 1m50円×5(最小注文数)+1000円(送料)・・・なんか金をドブに捨ててる感たっぷり。 急場しのぎにサーボコネクタの延長ケーブルを買おうとすると15cm480円×4。あう~ ちなみにお店で買うと1m100円。 ・・・む、無駄遣いすぎる・・・。財布の中で新渡戸稲造が泣いてる~ そんなときに、宇宙ロボコンファイターXさんからBBSに書き込みが! 情報ありがとうございました。ちょっとホームセンター巡りしてみます。 |
| 2004/01/05 (月) |
|
昨日の話。 インターネットで調べるとオイラの家の近所(とは言え、かなりの距離だが)にドイトがあるらしい。 なんと朝の9時から開店している。 よっしゃ!休日出勤する前にちょっと寄って熱収縮チューブを見つけてくるかァ! と目論んでいたら案の定寝坊しました(泣)目が醒めたのは昼ちょっと前(泣)  失意のどん底で出勤したのですが、
途中「もしや?」と思って駄目モトでこの店に寄ってみました。
失意のどん底で出勤したのですが、
途中「もしや?」と思って駄目モトでこの店に寄ってみました。ここは品揃えが豊富なので熱収縮チューブも買えるはず! 営業さえしていればっ! 結果は・・・見事購入成功!1m30円でした。おお安い安い! これで神経繋がった状態で「第2回 HSWBユーザーサポート会」出られそうです♪ 全然関係ない話ですが、 このお店の隣りにあるカレー屋さんの厨房には髪型を変えれば小泉純一郎そっくりな人がいます。 行ってみそ。 (最近は確認していないので、もしかしたらいないかも・・・) で、今日の話。 同じ3φなはずなのに、買ってきたチューブは配線の入りが悪い。 コードを40cm通すのに悪戦苦闘して1時間以上かかりました。こりゃあ半田付け作業は明日だな。 う~、安いのには理由があったか・・・ |
| 2004/01/06 (火) |
|
「♪はっじめて~の、アコム~」 で一躍有名になった小野真弓の初舞台が19時から下北沢の「劇」小劇場であったので見に行く。 秦建日子プロデュース VOL.10「Re-Birth2004」 無邪気な新米カウンセラー VS 心配性の指導教官。 そこに現れる、謎の二重人格の患者。交差する4つの人格。 もつれあう3人の運命。そして―――消滅するひとつの命。 はたして、「呪いの連鎖」は断ち切られるのか……それとも というお話。ちなみに今日が初日。 主演ということなので楽しみにしていたんだけど、演者4人のうち、いちばん出番が少なかった(泣) 初舞台じゃあしょうがないか?  なんかね~、表情が硬かったというか、お芝居に慣れていないというか、初々しかったです。
なんかね~、表情が硬かったというか、お芝居に慣れていないというか、初々しかったです。でも舞台が終わってから劇場入り口で事務所関係者のオッサン連中に挨拶している彼女はCMのまんまでした。 劇場の前で出待ちしている人がいたので便乗して、サインに応じているところをパチリ。 寒空の下、待って待ち続けて撮った写真が不鮮明でショックですが おのまゆ、かわいい~☆ (干支1まわりは年上のいい大人がなに言ってんだか・・・) |
| 2004/01/07 (水) |
 えんぱく、大地に立つ!
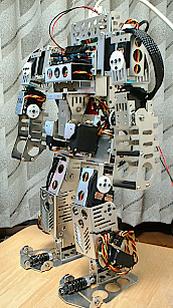
えんぱく、大地に立つ!配線をまとめ終えたので通電しました。無事に自分の足で立っています。 おー、ついにここまで来たか~(感慨) 写真では上手く隠れていますが、肩、股に向かって背中からケーブルが空中配線されています。 ちょっと格好悪いです。ここを引っ掛けられたら確実に倒れるだろうな~と思ってみたり。 で、よく見ると超音波センサーな頭がついてません。これから作ります。 2軸加速度センサー(ADXL202)も一緒に付けようと思っていて、 HSWB02に直接つなげてみたりしているのですが、うまい具合に値が読めなかったんです。 どうやらひと工作必要だったみたい。早速試してみようっと。 006P電池とラジコン受信機の配置処理がまだ固まっていません。 さて、どこに置こうか? 第5回ROBO-ONEの参加費用の振り込みのお知らせがメールで届く。 いよいよですねぇ~。  公式HPによると、決勝トーナメントに「プラレス3四郎」の神矢みのる氏が特別解説者として招待されるようです。
オイラも「プラ3」の影響を受けた人の一人です。
当然、コミックは全巻持っているし、アニメもLD-BOXで持っていたり(笑)
公式HPによると、決勝トーナメントに「プラレス3四郎」の神矢みのる氏が特別解説者として招待されるようです。
オイラも「プラ3」の影響を受けた人の一人です。
当然、コミックは全巻持っているし、アニメもLD-BOXで持っていたり(笑)柔王丸だってソラで書けるよ~ん。(SD風だけど) |
| 2004/01/08 (木) |
|
最近、日付変更線を越える前に家に戻れなくなっています。うえ~ん。 モーション作成の本格的スタートは10日に講習を受けてからってことになりそう。 (でも、11日と12日は休出決定!(号泣)) 10日にロボットを持って秋葉原へGO!な訳なんですが、どうやって持っていこうか? 今までだったらナップサックに詰め込んでいたんですけどね~、 モーションを作り始めたら原点が狂わない運送方法ってのを考えないと・・・。 オイラの家には幼稚園児1人程度は楽々としまる大きなバッグがあるんだけど、 材質がやわらかいから、これでロボットを運びたくはないな~。 何か集まりがあるときに、よく見かけるのが旅行鞄を使う方法。 なるほど、これならローラーがついてて移動が楽そうだ。 だけど日本領土内から出たことのないオイラに旅行鞄はない。 ついでに言うとパスポートすら持ってない(笑) ロボットにキャリングハンドルつけて衆人環視にさらしながら持ち運ぶとか・・・ 営団千代田線で一躍ヒーローだな(爆) |
| 2004/01/10 (土) |
|
始発で帰ってきました(泣) それもこれも進捗を遅れなく進める為、日曜も月曜も休出するのも進捗を遅れなく進める為(泣) そもそも、あんな密度の濃いテスト内容を1ヶ月でこなそうとすること自体が無茶なんだってはよ! ぶつぶつぶつぶつ・・・ 寝て起きたら昼でした。雑事を済ますと夕方でした。嗚呼~ そんな訳で夕方になってからの「第2回 HSWBユーザーサポート会」の参加です。  今回もなかなか盛況です。
今回もなかなか盛況です。オイラもアプリケーションの使い方をレクチャーしてもらいました。 モーション作成画面上の各ボタンの使い方がマニュアルを読んでもイマイチ掴めなかったんですよ。 (マニュアルの出来の問題じゃあないです。オイラの頭の出来の問題で、です。) 人の使い方をみて、一連の操作の流れが理解できました。 これでサクサクとモーション作成~といきたかったのですが、「歩行」に挑戦して挫折しました。 頭の中のイメージを実現させるのは、もう一掴み必要なようで~ ぐずぐずやってたら講師、姫路ソフトワークスの中村さんが歩行モーションのコツを教えてくれました。 
図は右から左へ遷移しています。 ①屈伸させる。 ②片方の足を更に屈伸させる。 ③更に屈伸させたほうの足の膝を伸ばす。 ④ぐいっと前へ荷重移動。 なるほど、こーすれば歩くんですね。頑張ります!  でも、さらにぐずぐずやっていたら遅く来店したDr-GIY氏がモーション作成をっ!
1歩足を踏み出すまでのモーションを作成してくれました。(2歩目は時間切れ)
でも、さらにぐずぐずやっていたら遅く来店したDr-GIY氏がモーション作成をっ!
1歩足を踏み出すまでのモーションを作成してくれました。(2歩目は時間切れ)・・・自分のロボットのモーションを自分で作らんでどうする!?おい デジカメで撮った動画を明度を調整して載せようとしたのですが、 Motion-JPEG形式のためか編集ソフトに読込めず。 う~ん、どうしたらいいんだろ? |
| 2004/01/11 (日) |
|
終電間際で帰ってきました(泣) やっても、やっても仕事の量が減らないのは、どーしてなんでしょう?るるる~ それに経費節減だか何だか知らないけど休日中は暖房を止めてやがるし…。 明日はスキーウェアで出勤してやろうか。 |
| 2004/01/12 (月) |
|
もう連休終わりなのね・・・(悲) 今朝はちょっと早く目が覚めたので、その時間を使ってモーション作りをしたのですが、 …やっぱり歩行は難しい。 どうもオイラは「大きな1歩を踏み出したい症候群」のようで、 ガバッと1歩を踏み出させて前につんのめさせてます。 なんかねー、いろいろな部位のサーボ角度をいじって収拾つかなくなっているって感じですね。 そう考えると40分程度で関節配置の違う他人のロボットに1歩を踏み出させたDr-GIY氏は凄い。 1000里の道も1歩から。習作を繰り返してコツを掴むしかないなー(時間ないけど) |
| 2004/01/14 (水) |
|
家に戻ってきてからの短い時間でちまちまとモーション作り(というかポーズ付け)していると、 突然、えんぱくが踊りだした。 ぬぉっ!なんじゃこのモーション!?HSWB02の隠し機能?? ・・・なんてこたーない、単にマイコンの電池切れでした。 う~ん。マイコンの電源が怪しくなると、こんな挙動を起こすのね~。 変に動いてロックしちゃうとサーボを壊しかねないので、マメに電池交換しよう。と心に誓いました。 (現に、首のサーボを1個破壊済みだったり・・・。可動範囲少ない部位だからねぇ~) さぁ、006P電池の再充電だ! オイラの持っている急速充電池は006Pを2個同時に充電するには17時間を要します。 ・・・17時間で急速? インターネットの海から、Motion-JPEG から MPEG にコンバートするツールを見つけてきました。 これで明度を調節した動画を載せられます。 ・屈伸 姫路ソフトワークス中村氏作 ・一歩 Dr-GIY氏作 デジカメの仕様上、音はありません。 人が作ったモーション載せて、どーするよ?だって動作パターンはこれしかないんだも~ん。開き直り ま、オリジナルは鋭意製作中ということで(笑) |
| 2004/01/16 (金) |
|
え~ん。時間がないよぉ~ 仕事が忙しくて家に帰る時間がだんだん遅くなり、 それに伴ってロボットに関わる時間が少なくなっています。 いくらHSWB02Cがモーションを簡単に作れるからって言っても 30~40分程度の時間でサクサク作れるほどオイラは経験を積んでないし。 で、ふと思ったのですが家に帰ってからは仕事の都合で作業時間が不定だけど、 起きてから家を出るまでの時間なら毎日決まった時間を確保できるのでは・・・? 実践しました。低血圧、低体温症のオイラには地獄の責め苦だったり(汗) けど、好きなことをする為に起きるので目覚めの感じは心地いいかも~♪ けど、その分1日が長く感じるので仕事の時間が辛いかも~・・・。う~ん、いつまで続けられるかな? 「歩行」はちょっとまとまった時間が欲しいので、それ以外のモーションを作り始めました。 ちょっくらパンチでも打ってみるか~? バキッ☆ 左手をひねるサーボが昇天されました(泣)ギアの歯が欠けたようでピクリとも動かん。ガーン ただでさえ時間がないってこの時期にぃぃぃいぃ~ッ!交換用パーツを取り寄せて修理だ! さらにこの怒りに任せてデジタルサーボプログラマー買っちゃうか?(サーボ3、4つ壊れると等価だし) モーション作れないから明日はセンサーと遊んでみよう。休出した後に(号泣) |
| 2004/01/17 (土) |
|
吹いてるよ、吹いてるよ! オイラをROBO-ONEから遠ざける風が強烈に!! 明日も休出だ!ちきしょーっ!! 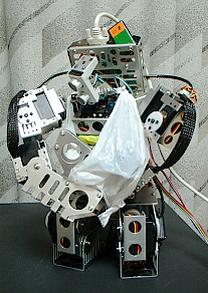 えんぱく、治療待ち・・・。
えんぱく、治療待ち・・・。 |
| 2004/01/18 (日) |
|
なんか体がだるいし、頭が痛いし・・・。風邪ひいちゃったかなぁ~? えんぱくを動かせないのでセンサーの結線とHSWB02による読み取りを試みよう。 その1:秋月で買った2軸加速度センサーから値を取得してみる。 このセンサーにはアナログ出力とデジタル出力(パルス)とがある。 電子回路の知識がないので、アナログ出力をそのままHSWB02のアナログ入力につなげてみる。 値は簡単に取得できるのだが、水平に置いた状態から右に90°、左に90°傾けても、±16しか値が変わらない。 ・・・5.6°単位。せめて±32くらいの値は返して欲しいのだが、やり方がわからん。 ならデジタル出力を使ってみよう。 デジタル入力に直接つなげてみても何の値も返ってこない。 ひと工作してみると 値はとれるのですが、傾けると0以下の値(・・・2、1、0、255、254・・・)を返してくる。 制御に使いづらい値だな~。 抵抗を半分の500KΩ(4ms周期)にしてみたら、なんかいい値が取り続けられるので、ひとまずこれでいこうかと思う。 (だけど、これが適正かどうかは判りません。誰か教えて) これで転倒からの自動復帰が仕込めるってもんだ。(だけどしばらくモーションは作れんのだ!く~っ) その2:超音波センサーから値を取得してみる。 これには浅草ギ研のHPを参考にする。 参考にするものがあるってのに七転八倒しながら試行錯誤を繰り返すこと1時間。 何とか値の取得に成功。 とりあえずこれでえんぱくが何かを見てるってのが判ったけど、 何を見てこの値を返しているのかが判らないので、明日以降はこのへんの調査をしてみようと思う。 ・・・焦りを抑えつつ・・・ |
| 2004/01/19 (月) |
|
超音波センサーで距離を測ってみる。 3cm~3mまで測れるらしいのだが、天井に向けて測定しても40cmくらいの値しか返してこない。 別に天井の低い部屋に住んでいるわけではないので念のため。 壁に向けて測定しても40cmくらいの値しか返してこない。 なにかやり方が間違っているんだろうか?それとも、目には見えない何者かがそこに居るとか? オイラの住んでいる家の隣りはお墓だから充分に有り得そうな話だが・・・(笑) せめて1mくらいは測距してくれねーかなぁ?今のままじゃすげー近視なロボットになっちゃうぞ。 |
| 2004/01/22 (木) |
|
しばらくHPの更新が出来なかったのですが、「お、モーションと作り込んでるんだな?」と思わせつつ、
実際は仕事が忙しかっただけだったり・・・。 まぁ、そのお陰で仕事の進捗はがけっぷちを何とか死守しながら推移しています。 ロボットのほうの進捗は?というと、がけっぷちを2歩ほど踏み出したような感じが・・・(汗) 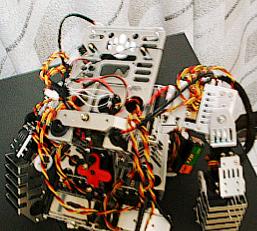 現在のえんぱくはこんな状態です。
現在のえんぱくはこんな状態です。背中からHSWB02を取り外しています。モーションどころの騒ぎじゃあ~りません。 なんでこんな事をしているのかというと、 マイコンボードの下にセンサ系の基板を配置しようとしているから。 (メンテナンス性が悪そーってのが心配のタネなんですが・・・) 基板には超音波センサーのコネクタ中継と2軸加速度センサーとサーボ用電源電圧の監視端子が載ります。 2軸加速度センサーは地面と水平に置かないと機体の前後左右の傾きが読み取れません。 えんぱくの基板設置面は地面と垂直方向のみで水平方向の設置面がないんですが、 そこでこんな工作をしてみました。 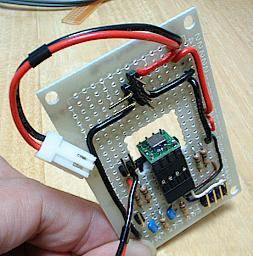 基板に穴を開け、その表と裏に両面テープでコネクタを接着してソケット代わりにしました。
両面テープが厚みのあるものなので、サイズはぴったり!
基板に穴を開け、その表と裏に両面テープでコネクタを接着してソケット代わりにしました。
両面テープが厚みのあるものなので、サイズはぴったり!なんか、こう自分の企みが思い通りに決まったときって気持ちいいっすね~♪ (基板の裏側は恥ずかしくって見せられませんが(笑)) ・・・と、いう作業をここ最近の夜中にやっておりました。 |
| 2004/01/24 (土) |
|
今日もいつものよーに休出でした。で、終電で帰れずにタクシーで帰ってきました。(しくしく) いくらオンスケ(当初のスケジュール通りの進捗になること)にする為だって、 終電過ぎるまで作業しつづけるってのはどうよ? (ちなみにオイラはお手伝い的立場だったので、実質的作業はほとんどなし) まぁ、そのお陰で来週からのお仕事は楽になりそうなんですが、 ロボットの方が危機的状況です。 どーすんのよ、1週間後は大会だよ!? 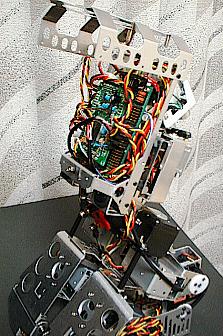 HSWB02の再搭載を完了しました。
HSWB02の再搭載を完了しました。えんぱくは腕が簡単に取り外せる構造なので、こんな作業のときは比較的楽にできますね。 センサー系の基板の部品配置を何にも考えずにおこなった為、基板のコネクタ部分が干渉して 背中フレームに直に固定できませんでした。 なので間に3mmのスペーサーを入れたのですが、その高さがHSWB02と干渉して ここのスペーサーも3mm延長することに。そうしたら背中のカバーを閉められない事態に(汗) しょうがないので下側だけを延長して基盤を無理矢理斜めに取り付けちゃいました。 どうか衝撃で割れたりしませんよ~に~ ちなみにHSWB02とセンサー基板の間は紙をはさんで絶縁しています。 さて、これから寝ずの作業だ。うひ~ |
| 2004/01/25 (日) |
|
左手をひねるサーボが逝かれた えんぱく ですが、あのあと夢現工房の
F氏から遅効性と即効性の2つの処方箋を頂き、完治いたしました。採用したのは即効性のほう。 ありがとうございました。 えんぱく が一言お礼を言いたいそうです。 久しぶりに「所さんの目がテン」を見る。 ああっ 魚住りえ 萌ええぇ~~っ だけど左手の薬指に指輪が。そーよねぇ結婚したんよね~。(悲) 番組を見終わったところで意識が途絶える。ZZZZZ・・・  よくよく考えれば、今日は大会前の最後の休日である。
よくよく考えれば、今日は大会前の最後の休日である。足りない部品を買出しにいかなくては。何が足りないのか・・・。 (足りないのはモーションだよ!というつっこみはナシでお願い) えんぱくは頭がまだ紙製なのは置いといて、バッテリーが1個しかありません(写真 上)。大会に出るには1個じゃあ不十分でしょう。 購入元のロボット王国に行くと、このコネクタに合う充電器が用意できなかったという理由でもう取り扱っていませんでした。 ガーン。まぁオイラもコネクタを付け替えたくらいだからな・・・。 そのまま足を伸ばしてスーパーラジコンへ。 ないね~5セル6V1100mAのニッカド電池って。 えんぱくのバッテリー格納場所は5セル平型のサイズで設計されているから大きさ優先なんです。 お店の人に聞いて見つけたのが6V2100mAhのニッケル水素の電池。(写真 下) これを2つと急速充電器と交換用のクリスタルを購入。 ・・・バッテリのコネクタが用意したものと合わない・・・。規格を統一して欲しいもんだ。 えんぱく、まだ歩けてません!大丈夫か? |
| 2004/01/26 (月) |
|
いつになく体調不良な今日この頃なんですが、会社を休むと確実に 「ロボットやるために休んだでしょう?」と言われるので多少無理をしてでも出勤する。 この反動が夜に出るので非常に困りもの。 そろそろ白旗を揚げようかな~なんて弱気になるが、 BBSに「雄姿を楽しみにしている」なんて書かれちゃっているので最後の最後まで悪あがきしてみよう。 そうでなくちゃカンファレンスに持っていった意味がない。 人間は意思で動く分子ロボット。思えばその通りになる! などと抜かした手前、秋葉原のCLUB GOODMANにメテオール等のライブを見に言っていたなんて 口が裂けても言えない(笑) えんぱく、まだ歩けてません!(自業自得) |
| 2004/01/27 (火) |
|
各ポーズを調整し、なんとか安定して歩けるようになった時点でデジカメ録画をしたのですが、 モーションの最後でバランスを崩し、50cm下へ落下。 ぎゃーっ!! だけど、どこも壊れていない。我ながら丈夫なロボットを作ったもんだ(笑) 歩行が安定しない原因は重量バランスの悪さにあるようです。 鎖骨サーボなんてもんがあるから上体が重いんだよな~。 そのせいで足首を構成する直行軸サーボ2つが安定してくれません。 う~ん。Hitecの新型サーボか悪魔のサーボ欲しいぞ!我にトルクを!(笑) 「第2回 HSWBユーザーサポート会」でネジロックの重要性をとくとくと語られたことを今、体現してます。 もー緩みまくり。それも全然動かしていない関節部分が緩むってのはどーゆうこと? 困ったことに鎖骨リンクの軸になっているスペーサーのねじ山が馬鹿になったようでユルユル状態。 対策を講じないといかんのー。とりあえずネジロックしまくろうか。 この部分ってスラストベアリング仕込んであるから交換の手間が大変なんだよな~。 えんぱく、歩き始めましたがコケます! |
| 2004/01/29 (木) |
|
明日、仕事休んでもいいですか? そうすれば35時間ほど作業時間が作れるんですが・・・。だめですか?だめですよね。 ええ、わかっています。社会的信用を失ってでも強行する勇気ないですし(弱) ここ最近、「昼間眠くて、夜寝られない」という天邪鬼な体調に辟易してます。 夜中に眠れないので通電してないえんぱくをぐにぐに動かしていたら、 右腕が上がったきり下ろせなくなりました。どうやら先日の落下事故の時に負傷していたようです。がーん。 でも、まだ全然眠くならないので修理することに! てっきりプラスチックギアが欠けたものと思っていたのですが違っていました。 サーボにはモータ軸とサーボホーン軸の中間にもう1つ軸があります。 ケースの上蓋にこれの軸受けがあるのですが、ここが欠けていました。 軸がぶれちゃあサーボホーンは動かないわな。 ちなみに前回壊した腕サーボも調べてみたら同じように欠けていました。 (このサーボはさらに酷く、その軸が歪んでるし、サーボホーンのストッパーをぶち欠いていました。) さらに前々回壊した首サーボを調べてみたら・・・これはモーターの焼きつきが原因らしいです。 使えるものを寄せ集めてサーボ復活。めでたし。めでたし。 A-Doがもう歩いてる! フレームが仕上がったのがオイラより後なのにもう歩き出すとは、さすがは歴戦の覇者。 で、彼の歩行ムービーを見てひらめく。骨盤を安定させれば歩けるかな? 他のロボットは一様に上体を正対させて歩いてる。 えんぱくは腹筋サーボがあるので腰が斜めになっても上体を動かしてバランスをとっているんだけど、 ちょこちょこ動かしているから反動で不安定になっているのでは・・・? まだ時間がある!試してみよう。 えんぱく、落下しない歩行に挑戦です(笑) |
| 2004/01/30 (金) |
|
泣いても笑っても、あと残り12時間だ! やりたいことの「や」の字も出来てないので必然的に今晩は徹夜♪ 参加資格審査用のモーションもまだだし、自立化もまだだし、 起き上がりのモーションもまだだし、ラジコン化もまだだし、 2軸加速度センサーの値も超音波センサーの値も参照してないし、 バッテリーなんて充電すらされてないし、頭部なんてまだ紙なんだぜ~。(泣)(泣)(泣)(泣) もう開き直るしかないな。よし!やれるところまでやってみるか! どこまで出来るかは神のみぞ知る! どこまで出来たかは会場で知れ! |
| 2004/01/31 (土) 朝 |
|
もう、当たって砕けるだけです(泣) 参加資格審査用モーションもまともに動かねぇ~~~っ |
| 2004/01/31 (土) 昼 |
当たる前に砕けました(号泣) ギリギリまで調整したのですがイマイチ決まらず、
それから目の前に転がっている工具を片っ端から詰め込んで家を出発。
会場についたのは受付終了ももうすぐという時間。
ギリギリまで調整したのですがイマイチ決まらず、
それから目の前に転がっている工具を片っ端から詰め込んで家を出発。
会場についたのは受付終了ももうすぐという時間。そこから参加資格審査の締め切り時間まで1時間もないような状態で、 モーションを動かしてみたら案の定コケる。・・・おいおい、そんな前のめりになるポーズは作ってないぞ。 「このつま先が全然踏ん張れてないんじゃないの?」 ということで、近くにいた姫路ソフトワークスの中村氏、 夢現工房のF氏、 メカトロ仙術のほり氏がつま先固定作戦を敢行してくれるも、 結局上手く歩けないまま時間切れと相成りました(悲)2足歩行って難しい。 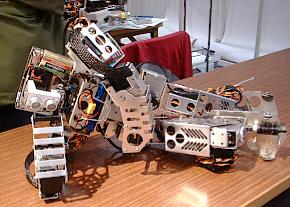 えんぱくはスポットライトを浴びられなかったので、ふて寝。
えんぱくはスポットライトを浴びられなかったので、ふて寝。ごめんよぉぉおお~。 オイラは選手控え室(試合会場の裏手)をウロウロ。 いつも拝見しているHPの作者さんやいつもお世話になっているツールの作者さんにご挨拶してました。 選手控え室って楽しいよ。 いろんな話が出来るし情報交換も出来る。なにより他人のアイディアを間近で見られるし聞ける。 ROBO-ONEを観戦して興味を持った方は是非、こっちの世界に足を踏み入れてください。 親睦会で更に盛り上がって帰宅。 さー明日はまるで意図したかのような好カードが連発だからもう寝るぞ。実に41時間ぶり(笑) |
■戻る