最近はロボット開発なんて事をしています。気分は素形3四郎か兜十蔵か?
めざせ!第5回ROBO−ONE大会(予選は1/31、決勝は2/1だ!)
| 2003/11/01 (土) |
|
いよいよテクニカルカンファレンスです。お披露目です。
今日のこの日に自分のロボットを持ってくる人は結構いるようです。オイラもその一人ですが(笑)
えーっと、お披露目なのでロボットの名前を発表します。 命名:えんぱく 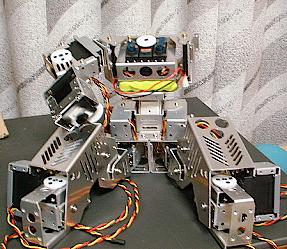
「えんぱく」とは色の名前です。漢字で書くと「鉛白」。英語なら「スチール・ホワイト」。 色で表現すると、今日の背景色になります。 英語名のほうが格好いいという意見もありますが、日本語表記でいきたいと思っています。 現時点では片腕、頭なしの鉛白さんですが、この状態でかなり重いです。 はたしてサーボのトルクが足りるのか心配になってきました。 もう1つ心配があります。 こんな時間(朝の4時)まで起きてHPの更新なんかしてて、なんか遅刻しそうです。 |
| 2003/11/02 (日) |
 テクニカルカンファレンス行ってきました。
テクニカルカンファレンス行ってきました。A-Doの菅原さんの話は相変わらず面白く、OMNIHEADの前田さんの話は技術的で、 はじめロボットの坂本さんは動画が一切使えず説明に苦戦していて、 MetaricFighterの森永さんは自分のペースを掴むまで大変そうでした(笑) 菅原さん曰く、30〜40cmクラスのロボットはトルク13Kg.cm以上のデジタルサーボを使い、 体重は3Kg以下じゃないと歩けない。 森永さん曰く、アクチュエータ(ラジコンサーボ)の総重量+500gを目標に。ネジの重量も馬鹿にできない。 自分のロボットの重さが気になるオイラとしては耳が痛い話ばっかりです。  親睦会にも参加しました。
親睦会にも参加しました。いつも覗いているHPの主がいっぱいです。わーい。 図に乗って名刺を配りまくってました。同席の皆様にはご迷惑をおかけしたかと・・・。 で、意を決して「えんぱく」をお披露目。 バーニング宮田さんの必要最低限のフレームで作られた漢バーニングと比べると、 アルミの塊という感が拭えませんが、 「服を着させる」とか「シリコンで外皮を作る」なんて意見が飛び出したりしたところをみると 女の子座りするロボットとして印象を残せたかな?と思います。 でも一言断っておきますが、オイラは「萌え」系好きな男じゃないですよ。 いや、ほんとに(笑) 2次会にも参加しました。 なんとビックボス・西村さん(ROBO-ONE実行委員長)とロボコン館の店長さん達と同席でした。 その後、森永さんらが席に訪れたりして、いろんな話が聴けて楽しい1日でした。 追伸:昨日は一日中、人形つかいさんとFJ)坂本さんにはお世話になりっぱなしでした。 この場をかりてお礼申し上げます。 |
| 2003/11/03 (月) |
|
お披露目したら「これ重さ何Kg?」という質問が多くあった。 何Kgあるんでしょう?オイラにも判りません。 だって重さを測る装置もってないんだもん。 板金を外注してると、その後の軽量化なんてそうそう出来るものじゃないので買い控えてたんです。 でも、いい機会です!買いましたデジタル表示のやつ! 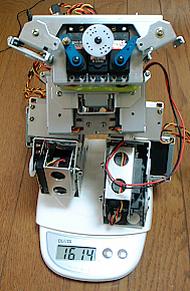 池袋のハンズの台所用品コーナーにあった
TANITAの『デジタルお料理はかり』。
最大計量2Kgの最小表示は1g、そしてお値段は¥3,600-。
ま、これくらいのスペックがあれば充分でしょう。さっそく体重測定
池袋のハンズの台所用品コーナーにあった
TANITAの『デジタルお料理はかり』。
最大計量2Kgの最小表示は1g、そしてお値段は¥3,600-。
ま、これくらいのスペックがあれば充分でしょう。さっそく体重測定・・・なんか江戸時代の拷問道具「石畳」にかけられている囚人のような格好だなぁ。 お、1.6Kg。ちなみに上腕は 220g。 これから完成時の総重量を推測すると 2.6Kgくらいになるのかな? 重い?標準?どうなんでしょう?? とりあえず3Kgを切りそうなので一安心ですが、 常連組が2Kgを切る軽量化に挑んでいるのでちょっとダイエットに挑戦してみます。 漢バーニングをみた後なんで拒食症なみの強迫観念に捕らわれそうですが(笑) (ありゃあギリギリまで減量して闘いに挑むボクサーみたいな雰囲気あるからなぁ。 さらに俺サーボでしょ〜。う〜ん) |
| 2003/11/04 (火) | ||||||||||||||
|
背中フレームのパーツ分割に頭を悩ます今日この頃。 厚紙で作った四角い擬似CPUボート(端的に言って『箱』)じゃあ干渉具合はよくわからんの〜! ということで本物を手に入れるべくCPUボードをアップグレードに出しました。 オイラの持ってるCPUボードは姫路ソフトワークスのHSWB−01。 半年前はお手軽にロボットをコントロールできるCPUボードって、 これくらいしかなかったので即買したのですが、 こいつは大きくてかさばるので最新の小さくて機能UPなHSWB−02に変更します。 |
||||||||||||||
HSWB−02の前に発売されたHSWB−01用オプションベースボードも持っていたりするので アップグレードは安いAコースで済むんだけど、ちょっと再計算を・・・。 無性に泣きたくなるのは何故なんでしょう・・・(悲) |
||||||||||||||
| 2003/11/05 (水) |
|
投票日が近いです。 サラリーマンやっていると、仕事先で「お願いします」攻撃に遭うけど、その人に投票はできないし、 かといって地元の候補者なんて、誰が何をやろうとしている人か知る機会ないでしょ。 そんな訳で今日、演説会なるものに行ってきました。 (単に仕事が嫌だから早く上がれる口実が欲しかったという噂もあり) 行ってびっくり!聞きに来てるのはオイラの親父&かーちゃん、そしてじーちゃんくらいの年齢の人ばっかり。 若い人ほとんどいないねー。投票率少なくなるはずだよ。 総サラリーマン化したこのご時世だと、家なんて食って寝るだけの場所でしかなく、 その地域には住んでないのも同然だから、こーゆうイベントには無関心になっちゃうのかね? 政治屋を辞めさせるいい機会だからオイラは自分の投票権、行使させてもらいます! さて誰に投票しようかの?今回はちょっと悩むのよねー |
| 2003/11/06 (木) |
|
なんかHPの更新ばっかりやって図面すら描いていないことに気付いたオイラ。 確かにカンファレンス終わってお披露目も無事終わって気が抜けてるってのは事実なんですが・・・。 いかんのー。のほほんとしてるとあっという間に2月がやってくるぞ。 人前に見せたからにゃあ、戦える状態にまで仕上げないと見せた責任をはたせないぞ! とハッパをかけておきながら今日もHPを更新。 (だから図面かけって!(笑)) オイラがいつも使っているROBO-ONEアンテナサイトをLINKに追加しました。 これであなたもROBO-ONE通(?) |
| 2003/11/08 (土) |
酉の市です。
行ってきました浅草鷲(おおとり)神社。

すごい人数でした。 二の酉(11月20日)に行く予定の人は営団地下鉄「三ノ輪」から向かったほうが早く境内に入れそうです。 「入谷」方面からだと列の長さが5倍くらいありました。 縁起物好きのオイラは毎年ここで熊手を買っています。今年も買いました。 熊手を買うとお店の人が手締めをしてくれたりするのですが、 オイラはまだ一度もやってもらったことがありません。どうしたら手締めしてくれるのでしょう? 値段交渉して値切った後にその値切り分をご祝儀として払うとしてくれるとか・・・。その辺がどーもよく解りません。 酉の市の前に新装開店 TSUKUMO「ロボット王国」に行ってきました。 店内放送がちょっと耳障りです。前は静かだったからね〜。 店舗スペースは広くなったようです。このスペースを生かして色々な商品を取り揃えて欲しいですね。 さらに客層も変わったかも。店内には家族連れやお年寄りの方が足を運んできたりします。 

で、ここでU-Knightの下笹さんと遭遇。 下笹氏「あ、あれ?いしかわさんですか?」 オイラ「し、し、し、下笹さん・・・ですか?」 スイマセン、人の顔覚えるの苦手なんです。(社会人として失格) ロボットはすぐ憶えられるのに、そのオーナーはなかなか憶えられないってのは、どーしてなんでしょう? |
| 2003/11/09 (日) |
|
投票したか? 投票率が少しでもUPして欲しいと思う今日この頃。 昨日の「ロボット王国」で展示してあったイトーレイネツ謹製「YDH-PDS」を見て軽量化のヒントを発見しました。 ネジです。 YDH-PDS はサーボを止めるネジにはM3を使っていますが、それ以外はほとんどM2の皿ネジで止められていました。  この皿ネジってのがポイント。
この皿ネジってのがポイント。フレームはざくり加工した分軽くなるし、皿ネジはネジ頭がない分、なべネジより軽いはず。 微々たる量でしょうが、これが全身100ヶ所以上にもなれば・・・いい値になるんじゃないですか? それよりなによりM2はM3より軽い!やられた〜!目から鱗が落ちましたよ。 オイラの機体設計って、深川ブラケットがその根幹にあるからネジにM2を使うって考え自体がなかったな〜。 次の機体は(その機会があったら)ネジをM2にして設計するぞ。 |
| 2003/11/10 (月) |
「ざくり加工」って誰にでもできる加工技術なんでしょうか?
昨日の軽量化の話は板金屋さんに頼む人にしか使えないんじゃないか?と思ってみたり・・・。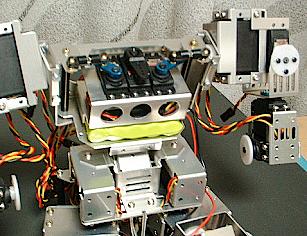 いつまでも右腕1本じゃあ可哀想なのでサーボを奮発して左腕を組み上げました。
(と言っても下腕は影も形もありませんが・・・)
いつまでも右腕1本じゃあ可哀想なのでサーボを奮発して左腕を組み上げました。
(と言っても下腕は影も形もありませんが・・・)なんか脇の下の広大な空間が気になるなぁ〜。 カンファレンスの時には亜脱臼状態でぶらんぶらんしていた腕ですが、 サーボとつながって保持できるようになりました。名付けて「鎖骨リンク」(笑) 最初はアルミ片から作ろうかと思っていたのですが、 ラジコン屋で使えそうな部品を見つけたのでこれを使いました。 TAMIYA ターンバックルタイロッドセット KYOSHO チタンアジャストロッド 15mm アジャストロッドは15mm, 20mm, 30mm, 34mm, 38mm, 42mm, 46mm, 50mm, 68mm とラインナップされてるのでネジ削る手間なくていいかも?(とことん既製品に頼るヤツ) |
| 2003/11/12 (水) |
 郷里に帰していたCPUボードが立派になって帰ってきました。
郷里に帰していたCPUボードが立派になって帰ってきました。箱も緩衝材も送り出したときと同じってことに、姫路ソフトワークスさんもなかなかやるな! にやり と思ったり(笑) ちなみに、この箱と緩衝材は板金屋さんから送られてきたものを再利用したものでした。 資源はめぐる糸車。南無〜 CPUボートが来たので早く背中の図面をおこしたいんだけど、 これには頭の高さが関係してくるので現在、首を設計中。 昨日紙工作してみたら、見事に鎖骨リンクと干渉してやんの・・・(泣)という訳で再設計。とほほ  最近、ロボットの頭にライトを使うムーブメントがありますが(あるのか?)
オイラはコレを使う予定です。浅草ギ研謹製「超音波センサー」。
最近、ロボットの頭にライトを使うムーブメントがありますが(あるのか?)
オイラはコレを使う予定です。浅草ギ研謹製「超音波センサー」。BestTechnologyからちょっと安くて性能の良さそうなもの が発売されてますが、 製作事例がHPで紹介されているほうを選びました。 あと、こっちのほうが基盤裏がゴテゴテしてないってのも理由の1つです。 はてさて、どんな頭が出来上がるのか・・・♪ |
| 2003/11/14 (金) | |
|
なんか最近、嫌がらせのように家でやるお仕事が増えて、ロボットに時間が割けないんですが、
気分転換の時間に頭と首の構成を練っていたりします。
で、そんなオイラを今、悩ましている問題は買った「超音波センサー」をどう固定するか。 とりあえず固定用と思われる穴は開いているのですが、 その穴の周囲に充分な空間がないのでネジやスペーサーがセンサーの部品と干渉しちゃうんですよ。 |
|
 ←前から攻めてみると、ネジ頭が干渉して斜めになっちゃうし
←前から攻めてみると、ネジ頭が干渉して斜めになっちゃうし |
 ←後ろから攻めてみると、どうも部品と接触しているような・・・
←後ろから攻めてみると、どうも部品と接触しているような・・・ネジ頭でギリギリだからスペーサーは使えないなー |
|
製作事例では、どーやって固定しているのかを見てみると・・・なんか無理矢理つなげてるような感じ。 どうしよう?プラスチックのネジでも探すしかないかな?(そんな都合のいいネジあるか?) なんかいい方法あるかな? 襖のガラス戸みたいに溝を掘った部品で挟むとか? 四隅だけ挟んで固定させるとか? 頭の部品をプラスチックなどの非伝導物で作るとか? いっそ両面テープで固定するとか? 基盤の前後をプラ棒で挟むような形で固定するとか? サーボに付属してくるゴムの部品をスペーサー代わりに使うとか? う〜ん・・・ |
|
| 2003/11/15 (土) |
|
今日は品川シーサイドの東京都立工業高等専門学校で「ロボットパーティ」でした。 遊びに行ったのがイベントの終盤で、会場投票の人気ロボットの発表会をしている最中でした。 結果は・・・すいません聞いてませんでした。 

ここで驚異的軽さの『MAGI』と 悪魔のサーボの『ヨコヅナグレート不知火』と 姫路ソフトワークス謹製『ロボットキット HSWR−K01』に会ってきました。 もちろん他にもいろいろお会いしてきました。 MAGIは軽いっすね〜。今の状態の「えんぱく」の腕3本分も軽いです。 足を振り下ろす反動を使った起き上がりを見せてもらいました。見事です。 その起き上がり動作は、えんぱくさんの挑戦科目です。目指せ!2.5Kgクラスの反動起き上がり! 不知火とは実は初対面だったりします。40cmクラスだったんですね。意外と大きかったです。 フレーム丸出しとは違い、外装を持ってるロボットで動作のクリアランスを保っているのは凄いことです。 HSWR-K01はお手頃価格のロボットキットです。頑丈です。 なんか昔遊んだリモコン戦車みたいな感覚で遊べます。姫路ソフトワークスさんもなかなかやるな! にやりです。(笑) いや〜楽しい時間が過ごせました。もっと早い時間に行けばよかった(笑)。 夜は日暮里の和音で「メテオール」のライブでした。 奇数月の第3土曜に定期的に行っていたライブも、 今日が今年最後ということでなんか妙〜な盛り上がりを見せてました。 「メテオール」を言葉で説明するのは難しいんですが、"妙な人たち"です。(オイラも人の事は言えません…) 他と特に違う点はCGクリエーターでもあったりするので、映像とコラボレーションした演奏が見られるってとこかな? この映像もなかなかに個性的です。(いろんな意味で) 日暮里でのライブでは民族衣装(?)を着て、民族楽器で演奏します。ちなみに今回の服装のテーマは「日本」 見事に歌舞いていますねー。 

途中のMCで、秋葉原で見つけた「へぇ〜ボタン」キーホルダーが大活躍。 持ってれば「へぇ〜」な時に押せて面白いかも?と思って買ったものが、こんなにも早く使う機会が訪れるとはっ! オイラもびっくりでした。 次回ライブは1月26日(月)に秋葉原のCLUB GOODMANにて。興味を持った方は是非。 |
| 2003/11/17 (月) |
 友人が超音波センサーの固定具を作ってくれる(かもしれない)ので採寸。
友人が超音波センサーの固定具を作ってくれる(かもしれない)ので採寸。なんか久しぶりの採寸作業だなぁ〜。ロボット作り始めた頃を思い出すよ。 ロボットを作るぞ!と心に決めてサーボとかを買い込んで、最初にした作業が部品の採寸でした。 なんで採寸したかというと ネット上のどこにもデータが落ちていなかったから!。 縦 x 横 x 高さのデータはあったんですけどね〜、CADデータは見付かりませんでしたね〜。 著作権に引っかかるのでしょうか?(単に見付け方が下手という説もあり) Hitec の HS-5645MG、HS-5245MG、深川STUDIOのブラケットとか、 M3ネジ頭とかM3ナットとかフランジ付ベアリングなんてものをテキトーに取り揃えています。 まぁ誰かの役には立つかな? 今、仕掛かっている作業が一段落したらHPにアップします。 (有)夢現工房のFさんからは一応の了承は得たので、とりあえずは載せても大丈夫でしょう。 |
| 2003/11/18 (火) |
|
う〜。体調不良で仕事を休んでしまった。 午前中だけ休んで仕事に復帰しようとしたんだけど、午後になっても調子は戻らなかった。 かかりつけの医者で血圧を測ると106-66でした。相変わらず低い〜。 薬をもらって、採血して、アロマオイルで首のマッサージをしてもらって明日に備えます。 季節の変わり目、体調には十分注意しましょう。 採寸した部品のCADデータを公開しました。 『過去の行動』から『●部品の採寸CADデータ』を選ぶと一覧が表示されます。自己責任で使ってね♪ |
| 2003/11/19 (水) |
|
ROBO−ONE公式HPに第5回大会の日程が発表されました。 予選は1月31日(土)、決勝は2月1日(日) ドアや階段や対角走破は2月29日(日)だだだだだ! 本戦以外の競技を2月29日に集中させたってことは「こぞって参加しろ!」ってことなんでしょうか? 今までのエントリー台数だと半日ももたない気がするんですが・・・。 ルールが若干緩めになるとか?・・・いや、まさかそんなことは有り得んな。 今度は何を仕掛けてくるんでしょうか、ROBO−ONE実行委員会は?動向に注目です。 なにはともあれ、エントリーの頃には動ける状態にしないとな。 頭と首と背中と下腕と足裏の図面を描かなくてはっ!(まだ結構残ってる〜(泣)) 追伸:日付変更線を超えたら「2の酉」です。 |
| 2003/11/20 (木) |
|
友人から「超音波センサーのブラケットを作るから採寸データよこせ!」という有り難いメールが届く。
他力本願なオイラとしては渡りに船なので、昨日採寸した超音波センサーのデータを早速送信する。 で、ちょっと気になったんですが、頭の形状を伝えなくても大丈夫なんでしょうか? ちょっとオイラのイメージを図面化してみよう。  えんぱくさんの頭はこんな感じにする予定なんで、これに合うようにブラケット作ってね。
じゃ、よろしく♪
えんぱくさんの頭はこんな感じにする予定なんで、これに合うようにブラケット作ってね。
じゃ、よろしく♪手間賃はいつものようにマクドナルドのセットで(笑) さて、明日はこれを紙工作して干渉具合をチェックだ。 |
| 2003/11/21 (金) |
|
今年のボジョレーはさくさく飲める〜(「る」は巻き舌調で) ボジョレー・ヌーボー解禁ということで、よく行く洋食屋さんが1日限定のディナーメニューをやる ってんで仕事帰りに寄ってきました。女の子を誘ってみたけど、いつものよーに玉砕。 まぁいいです。いつものことですから・・・(泣) そんなこんなで朝の3時まで食って〜飲んで〜騒いで〜。という訳で、今日の進捗なし。 |
| 2003/11/22 (土) | ||||||||
|
今日は国際ロボット展です。ROBO−ONEバンダイカップです。 が、その前に血液検査の結果を聞きにお医者さんの所へ・・・。 |
||||||||
血脂・・・左表のとおり 医者から「野菜を食え」「食生活を改善しろ」と注意されてきました。 多分オイラが結婚するまで改善は無理かと・・・(>言い切るなよ!) この話を聞いただけで医療費は千円ちょっと。3割負担はキビシイのぅ〜。 |
||||||||
|
で、やっと着きました東京ビックサイト!時間は午後3時半!遅すぎ!! 優勝決定戦の頃だったのですが、バンダイカップ会場は黒山の人だかりでリングなんて全然見えません。 フジテレビのカメラまであったり。誰かNEWSか何かで見た人いるのかな? 気になる優勝者は、坂本さんの「はじめロボット4号機」大会2連覇です! 準優勝は前田さんのオムニドリーム(新型オムニヘッド)、3位は中村さんのHSWR−03’でした。 

 噂のロボットコンパニオンも見てきました。人工女優っていうんだっけ?
噂のロボットコンパニオンも見てきました。人工女優っていうんだっけ?よくリアルに人に似せると印象が怖く(というか不気味に)なるんですが、 ぱっと見、緊張して表情が硬くなっているだけにしか見えないところが技術の進歩を感じると言うか、 製作者のこだわりが見えるというか・・・。う〜ん、なんて表現すればいいんでしょう? 肌の質感は、怖くて触れなかったのでわかりません。やっぱり人肌なんでしょうか?? ちゃんと下着はつけているのでしょうか??? (疑問がだんだん変な方向へ向かっていぞっ) す、すりーさいずは@= バキッ☆ 東京ビックサイトのすぐ近所でマイクロマウスの大会をやっていました。  大会会場と選手控えが同じ空間にあるせいか、物音1つ立てられないような張り詰めた空気が漂っていました。
大会会場と選手控えが同じ空間にあるせいか、物音1つ立てられないような張り詰めた空気が漂っていました。ゴールを目指すときのマイクロマウスは速いね! まるでハングオンするバイクみたいに迷路内を走破してました。一見の価値ありです。 会場で森永さんを発見。しばらくおしゃべりしてきました。エールを送ったつもりが逆に送られていたり(汗) 明日の決勝戦は観に行きます。14:00〜 |
| 2003/11/23 (日) |
|
東京ビックサイトのすぐ近所でマイクロマウスの大会をやっていました。 昨日は予選で今日は本戦です。おお、会場のレイアウトが昨日と違う。 

マイクロマウスの大会を初めて観ましたが、ROBO−ONEとは会場の空気が違いますねー。 手のひらサイズのマクロマウスがコンマ何秒を争うタイムアタック競技なんで、見るほうがみんな固唾を飲んで見守ってます。 5分間の持ち時間内でタイムアタックが5回出来、そのなかの最速タイムが記録になります。 このタイムアタック内に迷路を探索し、 ゴール(迷路内中央の2x2の空間)までの最短ルートをみつけ、 2回目、3回目以降のタイムアタックで迷路内を駆け抜けます。これが想像以上の速さ! ちょっと距離のある直線は加速するし、クランク状になっている迷路はその間に出来た空間を斜めに突っ切るし 初めて見るオイラにはインパクト大でした。 ちなみに大会優勝タイムは8秒391。驚異的です。 マウスの迷路探索時の動きに各オーナーの戦略が見えて面白いです。 1マス単位に動くものや、前進右折を1アクションにしているものや、 既に解明した迷路部分はタイムアタック時の動きで走破するものや、お尻を壁にくっつけて直線補正するものとか。 迷路内は結構汚れてるみたいでタイヤがスリップするようです。その補正も求められる技術の1つなんでしょうね。 なんかもー、バイクのレースみたい。 ちなみに森永さんは入賞に一歩及ばすの7位でしたが、特別賞を受賞しました。 おめでとうございます。そしてお疲れ様でした。いよいよROBO−ONE本腰ですね。 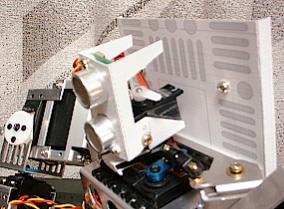 で、人の応援ばかりしてて自分の進捗はというと、頭と首のパーツの紙工作をし続けて5作目。
で、人の応援ばかりしてて自分の進捗はというと、頭と首のパーツの紙工作をし続けて5作目。鎖骨リンクが干渉しまくりで、首の形状がHPに載せたものとは別物になってしまいました。 頭の高さが決まって背中の高さも求められたので上半身はこんな感じになります。(頭の上下機構はまだ思考中) 推定身長40cm。 えーん、38cmくらいに収めたかったよー(泣) |
| 2003/11/24 (月) |
いつのまにか公式HPで第5回大会のエントリーが開始されている。参加申し込みはって書いてあるけど、「書類審査用資料」って何を送るんだ? 初参加になるから皆目検討もつかん。ちょっと先人達のBBSに書き込んで質問してみようかしらん。 だけど人間、自分で考えることも大切だから、ちょっとは自分の脳みそを使ってみよう。 前に聞いた話だと、書類審査は「会場に来た時にレギュレーション違反で出場できない」 なんてことにさせないためのチェック機能ということなので、 競技規定のレギュレーションに関係ありそうな項目をピックアップしてみる。 第3章 ロボットの規格ということだから、これから推測すると〜 ①図面などによる二足歩行型の証明&身長・重量データ ②足裏の形状がわかる図面 ③コントロール方法 ④リングテーマソングの情報 を送ればいいのかな?どうでしょう、これで合ってますか?>先人方 まぁ今、確実に言えることは『早く足裏の図面を描け!』って事ですな。 |
| 2003/11/24 (月) の夕方 |
人形つかいさんからBBSに書き込みをいただきました。もう気づいているかも知れませんが… ダウンロードした参加申し込み書を下のほうにスクロールさせていくと・・・・・・あ すいません。言われるまで全然気付きませんでした。 なんで1画面分と思い込んでたんだ?やっぱり徹夜中に見たのが・・・(以下、言い訳が23行ほど) ご指摘ありがとうございました。うわー、半日近く恥をさらしてたぞ、オイラ〜 なんか久しぶりに一生懸命考えたんだけどなー。脳みその使いどころ間違ってるねオイラ。 下の日記はいい恥さらしだから記念にそのまま残しておこう。くっくっく(>自虐的) |
| 2003/11/25 (火) |
|
せめて
「参加申込書(一式)はこちら (Word形式ファイル)」としておいて欲しいと思う。 ・・・いや、もう過ぎたことですから別にいいんですけど。 改めて書類審査用資料を見てみると、だいたい思ってたことが書いてある。 以下の項目についてわかりやすく記入してください全身図を1枚書くと、ここに サイズ、脚の長さ、重量、アクチュエータの種類と数、自由度、動力源、制御マイコン の情報が載せられるでしょ。 無線システムの詳細にはラジコンプロポを使うだとかを書けば良し。 高圧ガスは(使いたかったけど)使わないから別に書かなくて良し。ここまでは解る。 問題は残った項目。 「脚構造」って何だ?全身図で含まれちゃうものかな?それとも脚用に1枚書き起こすんでしょうか? 「屈伸、横歩きの方法」ってムービーを添付するんでしょうか? 「攻撃の方法」って?「蝶のように舞い、蜂のように刺す」とでも書いとけばいいの? そもそも全項目について書かなくてもいいんじゃないか?と思ってみたり。・・・しばらく悩んでみよう。  友達が作ってくれた超音波センサーのブラケットを受け取った。
友達が作ってくれた超音波センサーのブラケットを受け取った。すげー。こーゆう工作が簡単に出来る人だったんだー。 やっぱり車いじってる人は違うねー。 (というか、オイラの工作力があまりにも低すぎ!という噂あり。 う〜ん。これでも図画工作は4か5だったんだけどな〜。 ちなみに技術家庭科は3か4。あ゛年々落ちてってる!) |
| 2003/11/26 (水) |
|
冷蔵庫の中を覗いたら、賞味期限を1週間ほど過ぎた『カフェオレムース』があった。 捨てるのももったいないので食べてみた。 ・・・今、原因不明の腹痛と胸焼けに襲われている・・・。ううう 連休明けからこっち、ずっと背中の図面と格闘中。書いてる割には進展がないような。 週末か来週明けには残りのパーツを全部発注したいと思っているんですがねー。 12月は城南通信機さんが森口さんと下笹さんのフルサポート体制になるはずで オイラの分が処理されるのかどうかがものすごーく心配なんですけど(笑) 明日は職場の都合で17:00上がりだから帰りに秋葉原に寄って来ようと思ってみたり。 けど木曜の秋葉原ってお休みの店多いんだよなぁ〜。 |
| 2003/11/27 (木) |
|
明日は職場の都合で17:00上がりだから帰りに秋葉原に寄って来た。 『ネジの西川』でコネクタと圧着工具を買いたかったんだけど、Hitec の延長コード見せて 「これに合うやつありますか?」と尋ねたらの親父に「ない」と即答されてしまった。 閉店間際だったから面倒くさがられたのかな〜?ちっ、土曜日にリベンジだ。 それにしても自分の領分じゃない部分ってのは右も左もわからんから難儀だね。 まず第一に「何て言って質問したらいいかが分らない」んだから(困) 姫路ソフトワークスの中村さん宛てにメールでも送ってみようかしら? 構造的には02のサーボコネクタの部分と同じはずなんだし。 その足でTSUKUMO「ロボット王国」へ。なんか足繁く通ってるな〜オイラ。 ここの店長さんはROBO−ONE関係者だから書類審査用資料に何を書くのか尋ねてみた。 店長「全部の項目について書いてくるのはほとんど無いよ。みんな製作中でしょ。」 おお、なるほど。言われてみれば確かにその通りだ。 じゃあ、簡単な全身図を書いて、 あとサイズ(縦・横・高さ)、重量、動力源、制御マイコン、無線システムについてをまとめればいいのかな。そして脚構造や外観はオイラの場合は既に形になっているからデジカメ写真にして添付する、と。 オイラ「攻撃の方法に『蝶のように舞い、蜂のように刺したい』って書いてもいい?」 店長「だめ。それは要望だから。」 ちゃんちゃん♪ ロボット王国でインダストリーキャリアの田中さんにお会いしました。 これまでにもロボットパーティーとかの会場でお会いしていたのですが、 今日の今日まで顔と名前が一致していませんでした。 名刺まで戴いていたというのに、ほんとーに社会人として失格です。申し訳ない! |
| 2003/11/28 (金) |
|
地道〜に図面に寸法線をいれてます。はぁ、やっと背中フレーム図面が完了。残りは頭、首、下腕、足裏。
・・・まだまだあるのぅ。 サラリーマン稼業のほうの進捗が少々遅れ気味なので休日出勤することに(泣) 『ネジの西川』行けないじゃん! でも、BBSのほうでDr−GIYさんより圧着工具の情報を戴きました。 日曜にでもお店覗いて見ます。ありがとうございました。 |
| 2003/11/29 (土) |
|
うぉ!?もう大会参加者が発表されてる!急がねば! そんな矢先に問題勃発!首フレームの3面図がない。 どうやら前の状態のもので上書き更新しちゃったらしい。横からの図しか残っていなかった。ガーン。 そんな訳で紙製の首を採寸して再設計。 このまま寸法いれて図面を完成させてもいいんだけど、念のために紙工作を・・・。  手順はこんな感じ。
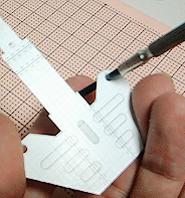
手順はこんな感じ。3面図から1枚板の図面(シートメタルって言うらしい)をおこします。 外周をくっつけるだけで簡単に終わります。 外周同士をくっつけたので、その部分はアルミ板を曲げた外側の状態です。 ちなみに板厚を示している点線同士を重ねると、曲げの内側の状態になります。 1枚板の図面が出来上がりました。これをプリンターで印刷します。 紙は厚紙を使います。オイラが使っているのは0.5mm厚のものです。えーっと 「レタークリエーション レイアウトシートA4-SS・2 210×297mm 」って書いてあります。 この紙は銀座のITO−YAって店で買っています。 文房具の専門店なので何でも揃っています。東京は便利ね♪ ペーパークラフト用の紙(EPSON PMマット紙 0.23mm厚 など)は薄くて強度が出ないと思います。 工作用紙ではプリンタが受け付けないかも(試してないので言い切れませんが・・・) 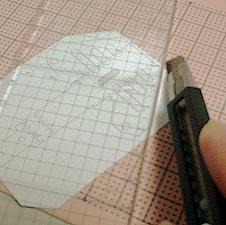 さぁ切り出しです。
さぁ切り出しです。机を傷つけないようにカッターマットの上で作業します。 直線は定規を使います。定規はカッティング用のものをお勧めします。 エッジ部分にステンレススチールが貼ってあって、カッターが定規を削ることを防いでくれます。 ベアリング用の穴など、必要最低限の穴(ネジ穴以外)もカッターで切り抜きます。 ベアリング用の穴は「その場所に収まれば良し」程度の精度で作業しています。 ここでの一番の注意点は刃物の軸線上に指を近づけないことです! 『スパッ!』でも『ザクッ!』でも『チクッ』でも痛いです。血は釘をなめた味がします。 
 ネジ穴を開けます。
ネジ穴を開けます。中心に画鋲で穴を開け、精密ドライバーを突っ込んで穴を広げています。 突っ込むドライバーを変えることでφ3とかφ2とかにします。 当然のことながら精度はでません。いいんです出なくても。紙ですから。試作ですから。 モノを固定できりゃあいいんです。 それでもブラケットやサーボホーンを固定するネジ穴の場合は多少気を使いますが・・・。 板同士をくっつけるネジなら図面上で位置があっていればOKなんです。  曲げです。
曲げです。アルミ板は相当の神経を使って作業することになりますが、紙なので気楽にさくさく曲げます。 曲げ位置を記した直線にカッティング用定規の垂直の部分を当てて折ります。 極端にずれていなければ使用に耐えます。というか、ここまで作業したんだから使わないと可哀想です。 そもそも0.2 mmや0.5mm のクリアランスなんて乱暴な使い方が予想されるROBO−ONEじゃあ「無い」も同然です。 それに紙なんでキチンと作ったって歪みます。  本物のサーボなどを使って組み立てます。
本物のサーボなどを使って組み立てます。おかしな部分や変な歪みは想像力で補完しましょう(笑)。そして次への糧にするのだ!だだだ! 紙工作すると干渉具合のほかに強度的に弱そうな部分とかネジが回せないとかが分ります。 あとは実寸で確認できるというのが大きい利点かな? コンピュータ画面だけじゃあ大きさってわからないもんだよ。 ちなみにこの首フレームは顔を下に向けた時にセンサーの邪魔になることが判明しました。・・・サーボホーン切るか? |
■戻る